グローバル×デジタルを加速する技術革新
各種産業分野では,エンドユーザーニーズの多様化や人手不足などを背景にして,高度な作業要求とその変化に対応する自動化が求められている。
日立は,知能を持った複数の異なるロボットがそれぞれ自律的に動くとともに,それらが賢く協調することで,柔軟性と効率性を両立させた自動化を実現する「自律協調:Collabotics」のコンセプトを提唱している。その基本的な考え方と,物流倉庫を例にした応用展開,ならびに実際のロボットシステムへの適用例について述べる。




製造・物流をはじめ,流通,運輸,建設・土木などの各種産業分野では,人手不足や働き方改革などの社会情勢を受けて,日々変化し高度化するエンドユーザーニーズにきめ細やかに対応し業務を進めていく必要がある。これらの制約や要請への対応は,各事業者が解決すべき課題であるとともに,新たな価値を生み出すイノベーションの契機でもある。
ロボットやAI(Artificial Intelligence)を用いた各種作業の知的自動化は,その実現に向けたキーとなる。日立は,イノベーションパートナーとしてこの自動化の機能を,コンポーネントからシステム,サービスに至る幅広いレイヤーで提供する事業展開をめざし,そこで必要となる各種技術の研究開発を行っている。
本稿では,そこで提唱する「自律協調:Collabotics」のコンセプトとその具体例について述べる。
産業分野における自動化の価値は,作業現場にさまざまな技術を明示的に導入することで,人手による限界を超えた性能・機能で作業を実施できるようになることと捉えることができる。さらには,技術の発展とともに,その性能・機能に限りない向上・拡大の可能性があることも,自動化の大きな特長である。特に,技術革新が加速するこれからの時代,後者の観点は極めて重要になっていくものと思われる。
一方,近年の作業現場では,定型作業の繰り返しだけではなく,多様な作業を適応的に実施することが求められる。製造物のライフサイクルに着目すると,例えば電気機械などの製品では5年以内のものが半数以上に達し,短縮化の一途を辿(たど)っているとの報告がある1)。よって,まったく同じ作業を何年も続けるという前提は,事業展開における大きな制約になる。また市場の伸びが著しいEC(Electronic Commerce)向け倉庫作業では,その大手が数百万種類以上もの商品を扱うことから容易に想像されるように,形や模様が異なり,入れ替わりの激しい極めて多種の物品を扱う必要がある。
以上により,これからの自動化では,性能や機能,構成などが時とともに変わっていく能力,ならびに変化・多様化する事業環境や顧客要求に柔軟に適応していく能力が強く求められる。
このような能力に焦点を当てた自動化を,ここでは「進化型オートメーション」と呼ぶことにする。以下に述べる技術の開発は,この進化型オートメーションを,幅広い産業分野で実現していくことをめざし進めているものである。
進化型オートメーションを実現するための核となるのが,機械の知能化・自律化である。昨今のAI技術の飛躍的な発展のもと,学術・実用の両面から,知能化された機械,すなわちロボットについての開発が盛んになっている。このロボットが,進化型オートメーションにおける主要な構成要素になることは言うまでもない。ただしそこでは,個々の作業を機械に置き換えて高度化していくという側面だけでなく,それらを複数個組み合わせて業務全体を賢いものに変革していくという側面に,産業応用という観点での本質的な意味がある。
そこで,オートメーション化を2つのレイヤーで捉え,1つ目を個々の機械要素が局所的な制約のもとで賢くなる「自律化」,2つ目をそれらがマクロな制約のもとで組み合わされて全体が賢くなる「協調化」と分離する。このように分離して考えることにより,局所と全体,あるいはコンポーネントとシステムなど,それぞれで要求される機能や能力をより適切なものとして捉えられるようになる。またこのような関係は,生物における個体と群れの関係や,人の社会における個人と組織の関係にも見られるもので,個とその集合体の両方に着目するという意味で,一定の必然性があるものと考える。そして,この自律・協調のコンセプトをcollaborationとroboticsの2つの用語から「Collabotics」と呼んでいる(図1参照)。
図1|オートメーションにおける自律協調(Collabotics)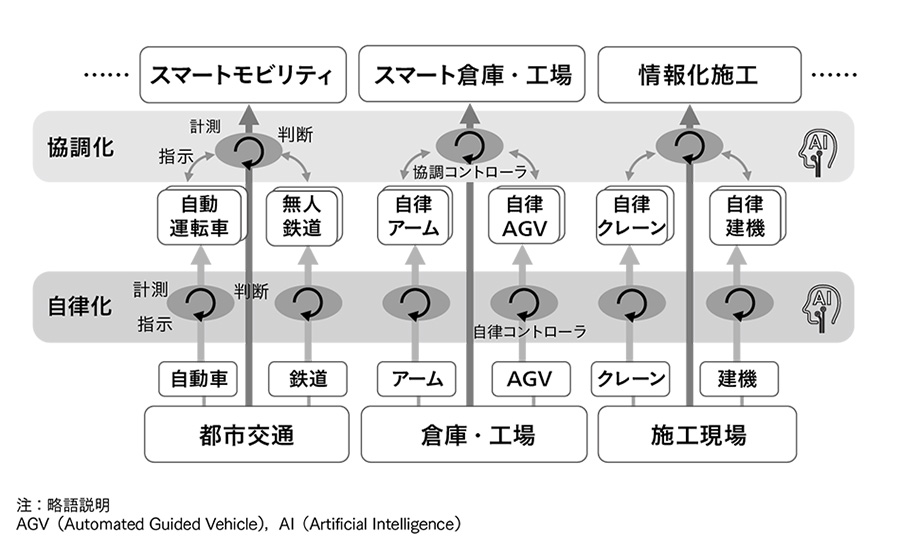 人が主に操作していた各種機械を知能化し賢くするものを「自律化」,それらを連携させて各種作業の場全体を賢くするものを「協調化」とする。
人が主に操作していた各種機械を知能化し賢くするものを「自律化」,それらを連携させて各種作業の場全体を賢くするものを「協調化」とする。
分散する複数の要素を連携させ,全体を賢く管理し統合制御する仕組みは,IoT(Internet of Things)やビッグデータ,エッジ制御システムなど,さまざまな文脈のもとで議論がなされ,発展を遂げている。その代表的な形態としては,全体を管理するレイヤー(ここでは「全体知」と呼ぶ。)が,エッジと位置付けられる各要素からセンサーデータなどの多くの情報を吸い上げて分析し,それぞれを全体最適の観点で精緻に制御していくという集中管理の方式がある(図2左参照)。これに対しCollaboticsでは,各要素の自律性を最大限尊重する。全体知が各要素(ここでは「自律個」と呼ぶ。)から吸い上げる情報はできるだけ少なくし,その代わりに全体の状況を,全体知が自らの手段で俯瞰(ふかん)的に観測する(図2右参照)。その全体観測に基づく判断で,各自律個に対して有用でかつ,全体の動作をよりよくしていくために必要な情報やサジェスチョンを与え,あとは各自律個の自律的動作に任せる。
このような考え方による全体制御の長所として,以下の点が挙げられる。
図2|Collaboticsにおける全体制御の考え方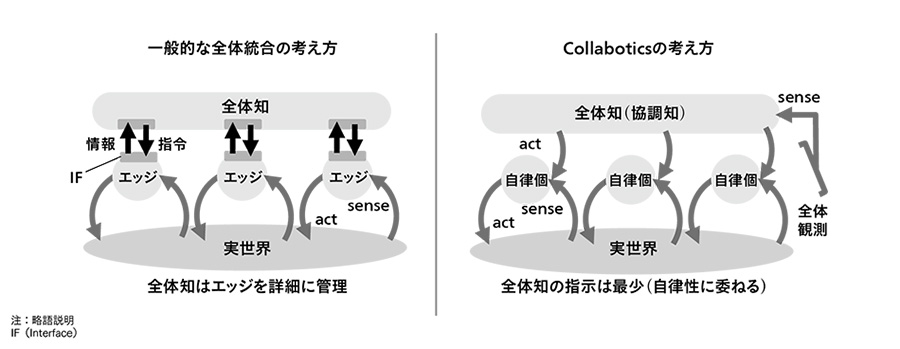 各自律個の自律性を最大限に尊重したうえで,全体を望ましい方向に導く。
各自律個の自律性を最大限に尊重したうえで,全体を望ましい方向に導く。
前章で述べた自律・協調の役割の分離と全体統合の考え方は,例えば以下のような産業分野におけるオートメーション化に応用できる。
ここでは物流倉庫を例に,その応用を述べる。
物流倉庫は,製造と流通をスムーズに連結させるハブとして,またモノを吸い上げ送り出す心臓部として極めて重要な機能を担う。近年は特に300兆円を超えるとも言われるEC市場の急拡大などに牽(けん)引され,その規模と役割は日に日に増大している。また扱う品種は多岐に渡るとともに,「安く・早く・高い品質」の継続的要求に対応できる,高度なオペレーションが求められるようになっている。
倉庫における代表的な業務としては,入出庫業務,保管と仕分け業務,検品などの付加業務などがある。これらのフィジカルな作業に着目すると,搬送ならびにマニピュレーションを基本とし,これにさまざまな操作が組み合わされたものと捉えることができる。
日立では,この搬送に関し,自ら作った地図をベースに軌道なしに移動するインテリジェントキャリー2),棚に潜り込んで持ち上げる低床式無人搬送車Racrew3)などを製品化した。さらにマニピュレーションの機能については,移動台車とハンドロボットを組み合わせたピッキングロボットシステム4)を試作し,その機能の一部を,自律型移動ロボットHiMoveRO5)として製品化している。
また,倉庫全体のオートメーション化に向けては,株式会社日立物流とともに,未来型自動化倉庫のコンセプトのもと,ドリームウェアハウスの開発6)に取り組んでいる。
日立は,倉庫業務全体の自動化を進めるにあたり,柔軟性を備え,運用条件や技術の発展に合わせた進化を容易にするため,各自動化要素の機能を明確に分離し,その自由な組み合わせでさまざまな業務を実施可能にするモジュール化を志向している。
例えば,Racrewによる仕分けシステムの将来型として,人が行うピッキング作業を含めて業務全体を無人化する技術を開発している。そこでは搬送台車とピッキングロボットが明確に分離された役割を担い,その協調連携作業で業務全体が実施される。業務のバランスに応じてそれぞれの数を変更するなど,スケールの調整が自由であり,またそれぞれの機能や性能も柔軟に変更できる。
さらには,仕分け機能だけではなく,入庫から出庫に至るさまざまな業務の自動化も,それぞれ機能ごとに分かれた多種多数のロボットや機器が協調・連携することで,多様・柔軟かつ更新容易な全体システムが構成される。これを示したのが図3である。人を含むさまざまな要素が,それぞれ自律的に動くとともに,全体として協調する。さらにその協調制御にあたっては,倉庫内部の状況のみならず,その上流・下流に位置づけられる生産や流通,消費者の状況に基づく適切なマネジメントを行う。
図3|物流倉庫における自律・協調 自律動作する各種マテハン機器やロボット,人が,適切に協調することで倉庫内業務が最適化される。
自律動作する各種マテハン機器やロボット,人が,適切に協調することで倉庫内業務が最適化される。
ここでは自律・協調の具体的な動作について,搬送ロボット(AGV:Automated Guided Vehicle)とアームロボットの連携を例に述べる。
AGVがバラ積みされた商品の入るケースを運び,アームロボットがその中から必要な商品をピックする業務を想定する。ここで二つのロボットはそれぞれ独自の知能(AI)を持ち,自律的に動作できる自律体であることを前提とする。すなわちAGVは自由な軌道で移動でき,アームロボットはケースの中から必要なものだけを認識・選択して把持できる。このようなシステムの効率性を考えると,動き続けるAGVから,適切なモノを取り出すことが望まれる。
しかしながら図4左に示すとおり,二つのロボットの観測情報だけから制御するシステムの考え方では,仮にそれらの情報や制御を統合したとしても,認識が間に合わなかったり,商品の積まれ方によっては,AGVの移動が速すぎてその把持に失敗したりするなどの問題が生じる。よって,確実な動作を保証するためには,アームロボットが商品を取り出す際に,AGVを一旦停止させる必要がある。
そこで本システムでは,別の視点から観測できる全体知として,新たなAIを一つ追加する(図4右参照)。このAIは,AGVがロボットの前方に到達する前にケース内部を撮影し,取り出すべき商品がどの辺りにあるのか,またAGVがどれだけ速度を落とせばそれを確実に取り出せるのかを,深層学習の技術を用いて推定する。その判断をAGVならびにアームロボットに事前に伝えることで,AGVとアームロボットは,それぞれ能力を最大に発揮しつつ,全体としても確実かつ効率的な協調作業を実施することができる。さらには,組み替えの柔軟性や局所的な頑強性など,自律分散システムの持つ長所は保持される。
以上の考え方に基づくシステムを実際に構築し,効果を検証した(図5参照)。AGVの速度は0.5 m/sまで可変とし,ケースの中には,傾いて置かれるなど取り出しにくい状況の商品を混在させた。上述のとおり,全体知が適切な情報を二つの自律体に伝えることで,なるべく速度を落とさず,かつ失敗の無い確実な把持を可能とした。これにより従来平均13秒かかっていた作業を,8秒に短縮させることができた4)。
図4|AGVとアームロボットの自律協調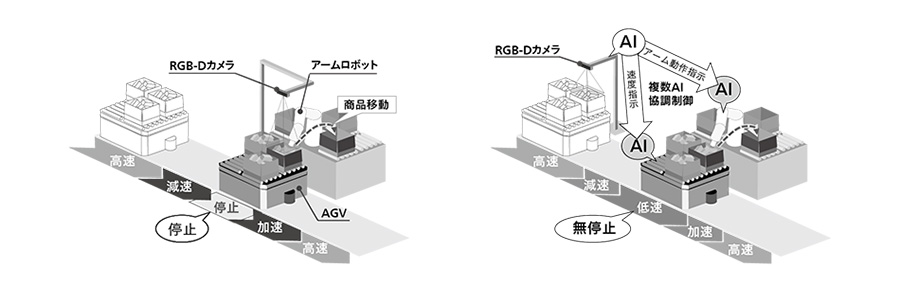 従来システム(左)ではAGVがアームロボットで停止していたものを,新たなAIを加えることで,無停止での作業を実現する。
従来システム(左)ではAGVがアームロボットで停止していたものを,新たなAIを加えることで,無停止での作業を実現する。
図5|実機の動作の様子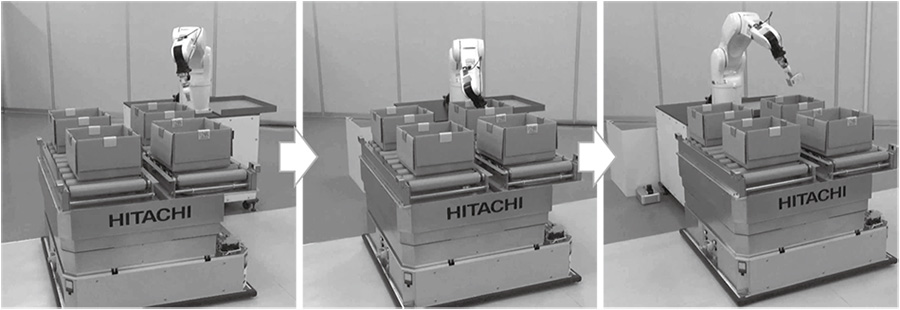 AGVの速度や商品の積まれ方に応じて,適切なアームの動きを行う。
AGVの速度や商品の積まれ方に応じて,適切なアームの動きを行う。
Collaboticsがめざすのは,ロボットや人の協調による創発(emergence)である。すなわち,部分の性質の単純な総和にとどまらない効果が,全体として現れるシステムの構築である。
持続的に成長する社会の実現に向け,オートメーションによるさまざまな業務の高度化と,さらには高度化された複数の業務の連携による創発をめざし,ロボット技術の開発とその実装を展開していく。
