Overview
自動運転技術の研究開発が加速している。自動運転システムでは,外界認識情報などの膨大なデータの処理・解析や,データセンター・インフラとの情報連携など広範な技術が必要となる。自動運転システムの早期実用化に向けた日立グループ各社の連携した取り組みについて紹介する。





モビリティを取り巻く環境としてクルマの増加・ドライバーの高齢化などが進み,それに対する社会的ニーズとして交通事故の撲滅,渋滞解消,CO2排出量削減が求められている。近年,IoT(Internet of Things)によりわれわれの生活が大きく変わろうとしており,中でも「つながるクルマ」として自動運転の実現のための技術開発が加速している。運転支援として発達してきたセンシング技術に加えコネクテッド技術の進歩により,安全・安心・利便性の高いクルマ社会が実現される。
本稿では安全・安心・便利を成立させるための,自動運転時代に向けた取り組みなどについて紹介する。
日立グループは安全・快適・環境・時間の4つの機能のバランスを実現する自動運転システムをめざし,社会的ニーズである事故撲滅,環境保全,高齢者移動支援,渋滞解消,快適性向上などに対応するクルマづくりに,新たなソリューションを提供することによる社会貢献を事業コンセプトとしている(図1参照)。
図1|自動運転システムコンセプト
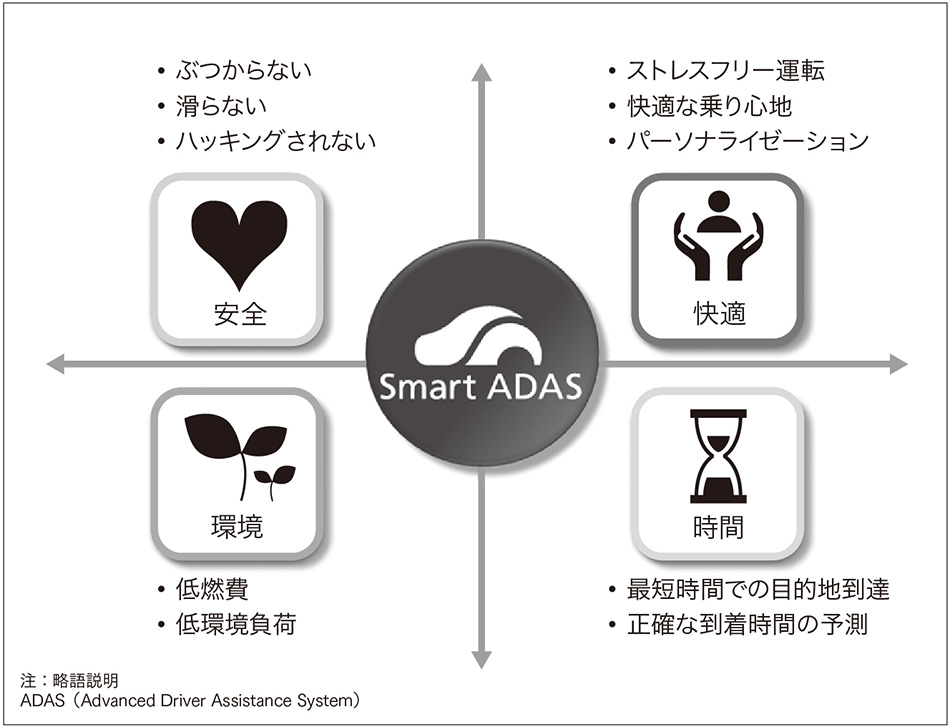 ADASを進化させたSmart ADASにて「安全,快適,環境,時間,4つのユーザー価値のバランス」を実現する自動運転システムを提供する。
ADASを進化させたSmart ADASにて「安全,快適,環境,時間,4つのユーザー価値のバランス」を実現する自動運転システムを提供する。
取り組みとしては,運転支援システムのセンシングとして2008年にステレオカメラを製品化し株式会社SUBARUのEyeSight※)に採用され,「ぶつからないクルマ」として運転支援システムの拡大に貢献してきた。2016年2月には茨城県ひたちなか市の常陸那珂有料道路において,単一車線走行における車線変更など,「自動運転レベル2」の走行実験を実施した。また,2016年12月から2017年3月にかけては,ステレオカメラをはじめ複数のセンサーを組み合わせたセンサーフュージョン機能を装備した車両で,一般道での自動走行の実現に向け茨城県の模擬市街路で実証実験を行い,自動運転の実現に向けデータの蓄積・システムの検証を進めている。
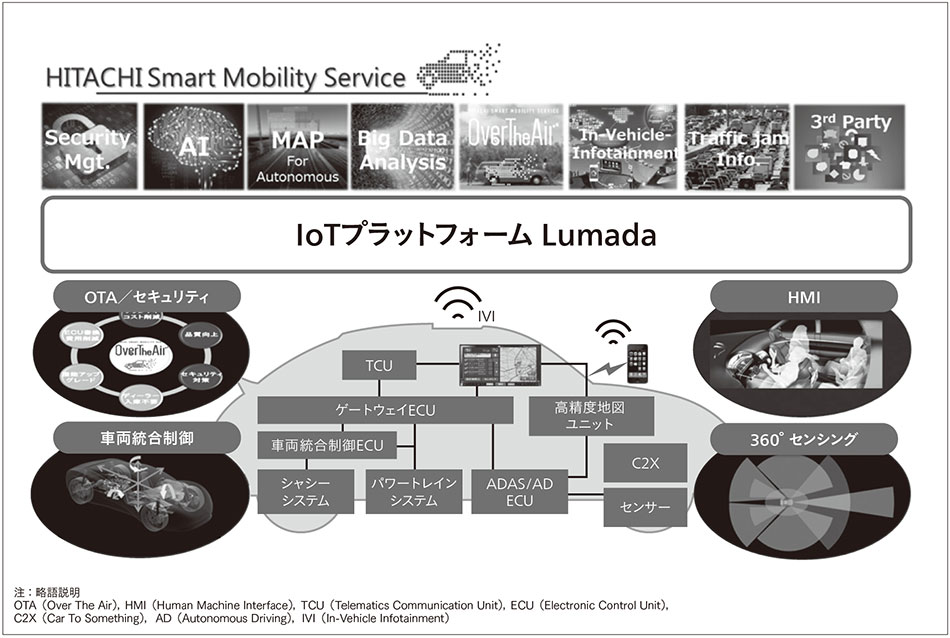
図2|日立グル−プの事業領域
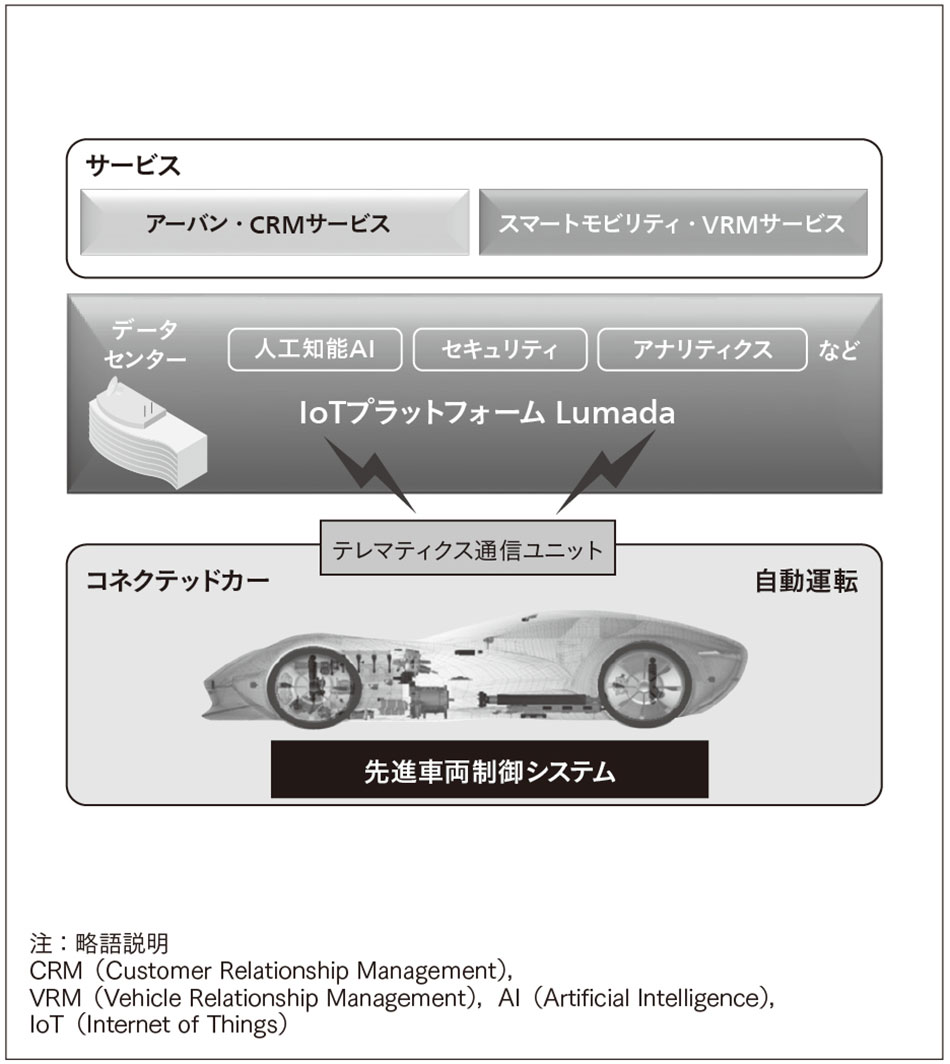 日立のIoTプラットフォ−ムLumadaをベースに広く事業領域を構築している。
日立のIoTプラットフォ−ムLumadaをベースに広く事業領域を構築している。
IoTが進みコネクテッドカーを基盤として,IT企業・サービス事業者も自動運転およびモビリティサービスに参入してきている。日立グループはOT(Operational Technology)/ITの両方を保有していることが強みであり,長年蓄積したそのノウハウを生かし2016年6月にIoTプラットフォームLumadaを立ち上げた。このLumadaの基本機能である,人工知能(AI:Artificial Intelligence)・セキュリティ・アナリティクスなどを使い,クラウド(データセンター)からコネクテッドサービス・自動運転と幅広い事業領域をカバーし,それらを協調させることにより,幅広い社会ニーズに応えていく(図2参照)。
各国で自動運転のレベル定義が若干異なるが,NHTSA(National Highway Traffic Safety Administration:米国運輸省国家道路交通安全局)では自動運転のレベル0から5までを定義している(図3参照)。各自動車メーカー,サプライヤーとも自動運転の開発を加速させており,現在のレベル1 運転支援[AEB(Autonomous Emergency Braking)など]からレベル2 部分自動運転[ACC(Adaptive Cruise Control)・LKS(Lane Keeping Assist System)など]へ移行しはじめている。2020年前後には高速道路での自動運転が,2025年までには一般道での自動運転技術が実用化されようとしている。日立は図4に示すロードマップのステップに沿って開発を進め,各フェーズでの技術の市場投入をめざしている。
図3|自動運転のレベル[SAE(Society of Automotive Engineers)基準]
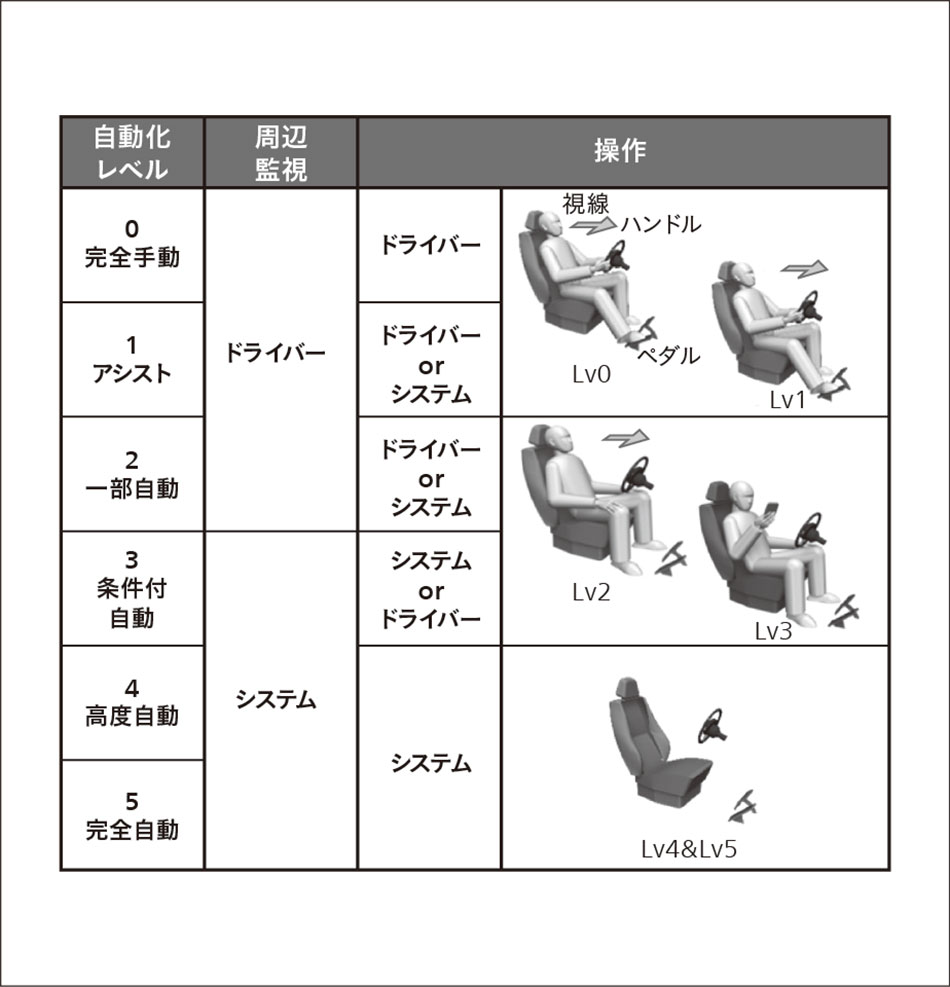 自動運転レベルについては周辺監視・操作の主体がドライバーかシステムかで大きく分類される。
自動運転レベルについては周辺監視・操作の主体がドライバーかシステムかで大きく分類される。
図4|自動運転ロードマップ
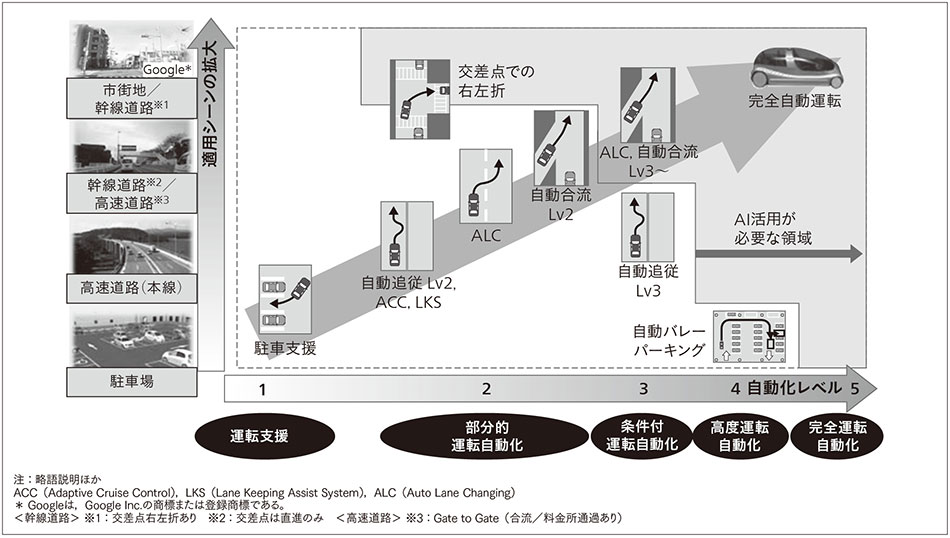 日立はロードマップに示すステップで開発を進め,各フェーズでの技術の市場投入をめざす。
日立はロードマップに示すステップで開発を進め,各フェーズでの技術の市場投入をめざす。
図5|自動運転の進化
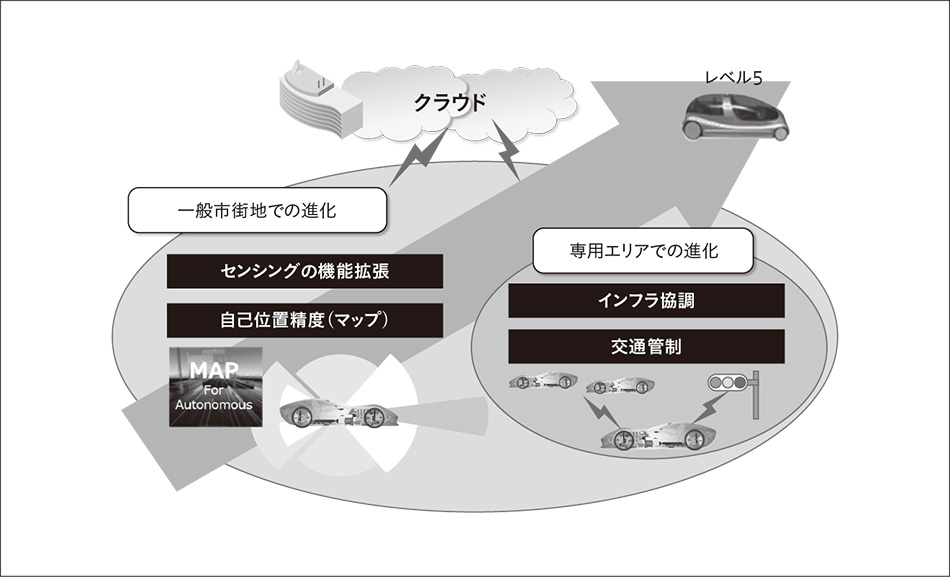 自動運転は,一般市街地の走行でセンシングなどが進化し,専用エリアでインフラ協調などが進化する。この二つのアプローチから技術開発が進み,将来のレベル5(完全自動運転)が見えてくる。
自動運転は,一般市街地の走行でセンシングなどが進化し,専用エリアでインフラ協調などが進化する。この二つのアプローチから技術開発が進み,将来のレベル5(完全自動運転)が見えてくる。
自動運転の進化として,クルマの自律機能の進化によるものが考えられる。現在の交通事故防止に大きく貢献し,かつドライバーの運転負荷軽減として拡大している運転支援システムが,高速道路での自動合流/自動車線変更,市街地での交差点右左折/渋滞追従など,走行シーンを徐々に拡大させながら高度自動運転に達するというものである。特に市街地ではかなり複雑な状況に対応しなければならず,センシングの機能拡張・自己位置検出(マップ)などの技術の進化によって実現されるが,技術的課題も多く,かなりの時間を要する。
もう一つの自動運転の進化として専用エリア/専用道路環境での自動運転の開発も進んでいる。これは各国の自治体が参画するインフラ協調型の進化になるが,市街地では環境が限定されるため高度自動運転の実現は比較的早い。この二つのアプローチから技術開発が進み,将来のレベル5(完全自動運転)が見えてくる(図5参照)。
自動運転のロードマップ実現のための技術は広範囲にわたるが,ポイントとなる「見て考える」,「つながる」,「意思疎通」,「走る/曲がる/止まる」の各要素で,次の4つの技術をはじめとした開発に取り組んでいる(図6参照)。
図6|技術マップ
 日立グル−プは,自動運転からモビリティサービスをカバ−する技術を保有しており,これらの技術を協調させることにより,幅広い社会ニ−ズに応えていく。
日立グル−プは,自動運転からモビリティサービスをカバ−する技術を保有しており,これらの技術を協調させることにより,幅広い社会ニ−ズに応えていく。
日立グループはフロントセンシングの主要センサーとして車載ステレオカメラの開発に注力している。ステレオカメラは高解像度の空間把握に向いたセンサーであり,自動運転の実現に必要な走行可能領域の認識機能において単眼カメラシステムより優位にある。
クラリオン株式会社では,近傍の全方位センシングとして車両のフロントグリル・リアバンパー・両サイドミラーなどにカメラを装着したSurroundEyeを市場投入している。また,カメラの補完として夜間や逆光などの外界環境の影響を受けにくいミリ波レーダの小型化・低コスト化にも取り組んでおり,ステレオカメラ,SurroundEye,ミリ波レーダなどを活用したセンサーフュージョンにより360°センシングを実現している。
また,自動運転では自車が地図上のどの場所を走行しているのかを正確に知る必要があるため,センシングで得られる外界認識情報と地図を照合し,自車位置を高精度に推定する。これらにAI技術を導入することで,より複雑な環境下での走行を可能とし,自動運転の高度化を加速させていく。
自動運転のレベルが上がるに従って膨大な情報処理が必要となり,公衆回線網を介して常時データセンターやインフラにつながっていくため,より高い情報処理性能や信頼性が求められる。日立グループでは,多様な製品分野で培った情報通信技術と,自動車システム技術を融合し,コネクテッドカーを実現するプラットフォームとして,さまざまなセンターサービスと車載機器を開発している。例えばソフトの膨大化に対応するソフトウェア更新技術(OTA),外部ネットワークと接続するためのセキュリティ対策としてのゲートウェイ技術,車両側で大量の情報を一次処理するコンピューティング技術などを組み合わせたソリューションを提供する。
近年,高速・大容量通信技術の進歩により,自動車内からさまざまなクラウド上のサービスが常時利用可能となった。自動運転化が進むと車内での時間の使い方をはじめ,自動車と人間の関係に大きな変化が起こる。こうした変化に対応するために,クラリオンでは車室内の情報機器を統合し,安全,快適,便利な情報提示と操作を実現する統合HMIと,ネットワークを介してクラウドサービスへのアクセスを実現するクラウド接続機能(Smart Access)を開発し提供する。
自動運転では,「走る」,「曲がる」,「止まる」の挙動が複合的に,あらゆるシーンでシームレスかつ安全で快適に行われなければならない。人間は雨・雪などの路面状態の変化を見ながら,最適な加減速およびハンドル操作を体感的に行っている。日立グループでは,自動運転に向けエンジン,ブレーキ,ステアリング,サスペンションの個々のコンポーネントの性能に磨きをかけると同時に,AD/ADAS(Autonomous Driving/Advanced Driver Assistance System)コントローラの経路指示に対して各コンポーネントの制御を統合し,確実な経路トレースと安全性の確保に加え,プロドライバー以上の乗り心地を実現すべく車両統合制御コントローラの開発を進めている。また,冗長性の観点から,当該コントローラはAD/ADASコントローラ失陥時のバックアップ機能も備える。
自動運転に向けた取り組みを述べてきたが,自動運転を成立させる技術範囲はとても広い。日立グループは関連するさまざまな分野の技術・ビジネスを保有しており,これらの技術を統合することで,より高度な自動運転をめざしていく。
