「つながるクルマ」で実現する自動運転技術
自動運転の実現には周辺認識技術の高度化が最重要課題である。中でも肝要となる車両周辺の認識と自車位置推定関連技術として,ステレオカメラの高性能化,ミリ波レーダの超小型化,SurroundEyeの進展,認識結果と地図情報とのマッチングによる自車位置推定方式などについて述べる。

![]()



2010年に株式会社SUBARU「EyeSight※)」(ver.2)が発売されて以降,安全運転支援装置の開発競争が始まり,近年ではそれが自動運転の開発競争となり激しさを増している。日本政府は2020年に開催されるスポーツイベントにあわせ,自動走行システムに必要な主要課題の開発を推進し,東京都と連携して次世代交通システムを開発することを目標としており,日立グループも同様のロードマップを念頭に研究開発を推進している。
自動運転は,システム側の寄与に応じてレベル0〜5の6段階に分類されている。レベル1と2はADAS(Advanced Driver Assistance System:先進運転支援システム)相当の機能で,その運転責任はドライバーにある。運転責任はレベル3以上ではシステム側に移り,いわゆる自動運転はこのレベル3以上を指す。
自動運転を実現するためには,次の3つのプロセスを短い周期で回すことが必要である。
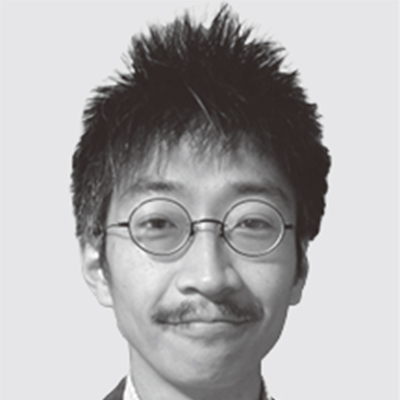
図1|車両周辺の認識と自車位置推定
 自動運転では,自車周辺の車両や白線の認識のみならず,地図とのマッチングによる自車位置推定が必要である(推定した自車位置から行動計画を策定するため)。
自動運転では,自車周辺の車両や白線の認識のみならず,地図とのマッチングによる自車位置推定が必要である(推定した自車位置から行動計画を策定するため)。
ここで,(2)以降の性能がいかに優れていても,(1)で認識できる範囲が狭ければ安全な自動運転が実現できないことは容易に想像できる。本稿では,この自動運転の高度化に向けた最重要課題である(1)に関連する日立グループの技術開発状況に関して述べる。具体的には,ステレオカメラの高性能化,ミリ波レーダの超小型化,SurroundEyeの進展,路面ペイントと地図情報のマッチングによる自車位置推定方式に関して説明する。
ステレオカメラは,濃淡画像に加えて距離情報を取得可能なセンサーである。左右カメラの見え方のずれから視差を計測し,三角測量の原理を用いて距離を算出できる。単眼カメラあるいは単眼カメラ+ミリ波レーダのシステムと比較すると,濃淡パターンの認識と三次元形状の認識を,画素単位で高解像度に融合できる点に強みがある。日立オートモティブシステムズ株式会社ではフロントセンシングの主要センサーとして車載ステレオカメラの開発に注力している。
近年,自動運転の実現に向けてとりわけ走行可能領域の認識機能が求められるようになった。ここで走行可能領域とは,従来の車線の認識に基づいた自車レーンの領域に限らず,道路の境界(路端)の認識に基づいた物理的に走行可能な領域を指す。自動運転において車両が自律的に走行経路を計画するために,走行可能領域認識は必要な機能である。前述の性質から,ステレオカメラは高解像度の空間把握に向いたセンサーであり,ステレオカメラ単体でこの機能を実現できる。このような背景から,日立はステレオカメラ向け路端および走行可能領域の認識技術を開発した。
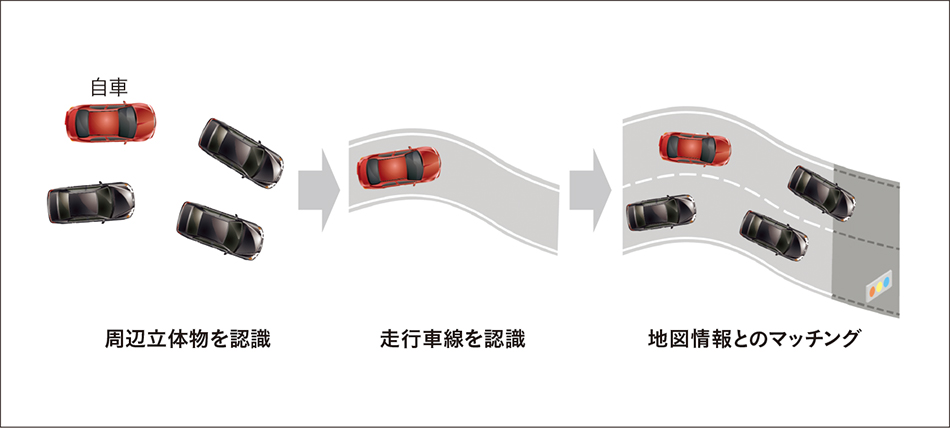
図2に,開発技術により検出した路端および走行可能領域を示す。さまざまな種類の路端,および路上の走行可能な領域を認識できていることが分かる。
図2|路端,走行可能領域の検出結果
 赤線が検出した路端で,ガードレール,土手,縁石,ポール,生垣,側壁,草,走行車両側面,駐車車両側面など各種の路端を検出可能である。緑領域が検出した走行可能領域である。
赤線が検出した路端で,ガードレール,土手,縁石,ポール,生垣,側壁,草,走行車両側面,駐車車両側面など各種の路端を検出可能である。緑領域が検出した走行可能領域である。
課題として,道路境界には縁石のように高さが低い,ポールのように途切れが存在するなど,形状が曖昧になりやすい点があった。そこで開発手法では,境界形状の算出を最適経路問題として設定し,空間内で候補となる境界形状を網羅的に探索して,「道路境界らしさ」を最大化する形状を算出する1)。ここで「道路境界らしさ」とは,境界線上における「路面からの高さに基づく特徴量」と「奥行方向の連続性」により定義する。このように最適経路問題を解くアプローチを採ることにより,境界形状が曖昧なケースでも安定的な推定が可能となった。さらに,境界部の高さを高速精緻に計測するベース技術として路面推定技術を開発しており,路端検知の性能を向上した2)。
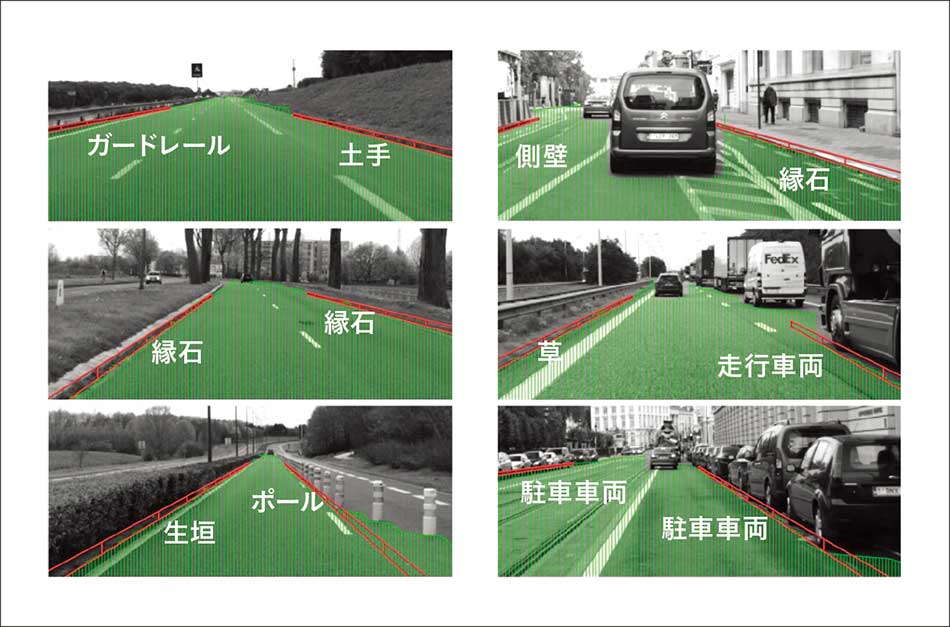
図3|路端の検出処理イメージ
 高さマップ(俯瞰図において路面からの高さを表示したマップ)を(a)に,境界特徴マップ(俯瞰図において道路境界が存在する確度を表示したマップ)を(b)に,路端検出結果を(c)にそれぞれ示す。
高さマップ(俯瞰図において路面からの高さを表示したマップ)を(a)に,境界特徴マップ(俯瞰図において道路境界が存在する確度を表示したマップ)を(b)に,路端検出結果を(c)にそれぞれ示す。
図3に路端の検出処理イメージを示す。図の(a)は,ステレオカメラによる距離計測および路面の推定処理に基づいて生成した高さマップであり,路面上の境界部の高さを示す。図の(b)は,高さマップを変換して生成した境界特徴マップであり,道路境界(一定以上の高さを有し,車両から見て最も手前側となる境界)が存在する確度を示す。図の(c)は,境界特徴マップの空間において算出した最適経路を画像に投影し,路端を検出した結果を示す。走行可能領域は,さらに左右前後の境界に囲まれた領域を計算することにより認識される。
この技術を用いることにより,2つの新しい車両制御のアプリケーションを開発し,社内外で実車デモを実施した1),3)。
ミリ波レーダは媒体として電波を用いるため,雨や霧,夜間や逆光などの外界環境の影響を受けにくい。一方で検出物体の識別は原理的に苦手である。これらの特徴により,自動運転においてはカメラ系センサーと組み合わせて用いられることが多く,その小型化と低コスト化が待たれている。
遠距離ミリ波レーダの小型化,低コスト化には,そのコストの数割を占めるアンテナ基板の面積の縮小が有効である。日立は,通常の平面アレイアンテナ[図4(a)参照]ではなく,ホーン&レンズアンテナ[同図(b)参照]を採用することにより,電波放射形状を損なうことなくアンテナ基板の大幅な縮小を試みた。しかし,この構造ではアンテナの高さが課題となることが分かった。このアンテナ構造では,電波放射源であるパッチアンテナをレンズのほぼ焦点位置に配置する。そこで,焦点距離がレンズ径とほぼ比例関係にあることに着目し,同図(c)に示すようにレンズを二分割することにした。実測の結果,高さを半減しつつ,従来の約1.5倍(平面アンテナの約2倍)のアンテナ効率が得られた。これにより,他社同等品に比べ,容積比で半減以下,平面アンテナ品に比べ3割程度の低コスト化が可能となる見通しを得た4)。
図4|従来のアンテナ形状と今回開発したアンテナ構造
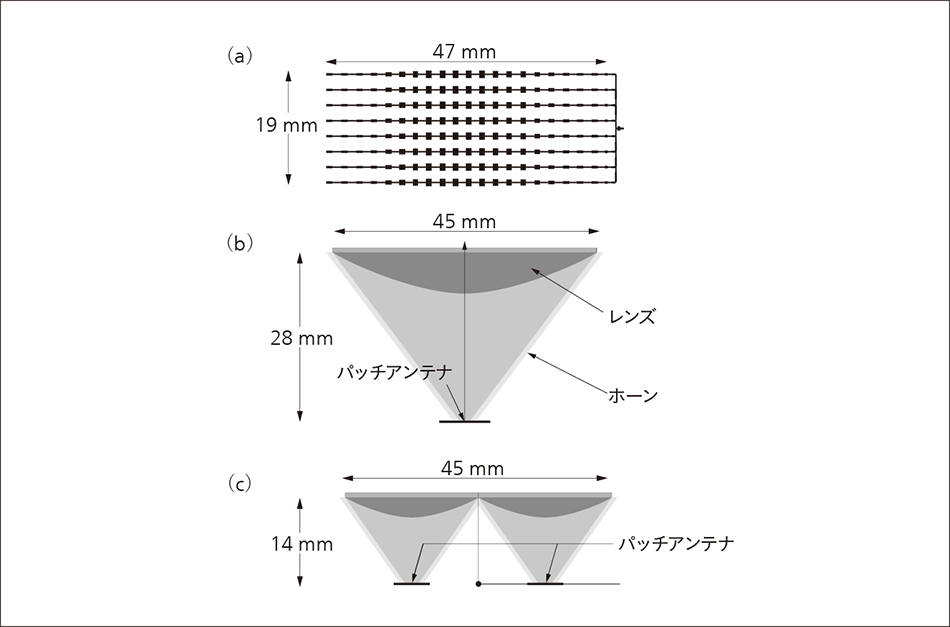 一般的に用いられている平面アンテナ形状(上面図)を(a)に,ホーン&レンズアンテナの構造(側面図)を(b)に,今回開発した低背化ホーン&レンズアンテナの構造(側面図)を(c)にそれぞれ示す。(b),(c)では,アンテナ基板はパッチ1つを内包するホ―ン底面開ロサイズに縮小できるため,低コスト化が可能になる。
一般的に用いられている平面アンテナ形状(上面図)を(a)に,ホーン&レンズアンテナの構造(側面図)を(b)に,今回開発した低背化ホーン&レンズアンテナの構造(側面図)を(c)にそれぞれ示す。(b),(c)では,アンテナ基板はパッチ1つを内包するホ―ン底面開ロサイズに縮小できるため,低コスト化が可能になる。
車両のフロントグリル,リアバンパー,両サイドミラーなど車両前後左右に装着された複数のカメラから得られる映像の視点を変換し,あたかも自車を上から見下ろしたかのような画像[俯瞰(ふかん)画像]を得ることにより,ドライバーの車両周辺監視を支援する機能をSurroundEye(サラウンドアイ)と呼ぶ(図5参照)。
SurroundEyeは市場に投入され,今では欠くことのできないHMI(Human Machine Interface)の一つとして認知・利用されている。
クラリオン株式会社では,新しい表示方法として「SurroundEyeの3次元表示(3D View)」,および車載カメラ市場ニーズに応え視界支援として,SurroundEyeの画像認識技術を用いた「移動体検知などの360度外界センシングによる警告支援」を開発した。また,駐車場の駐車枠検知を用いた駐車支援システムであるIPA(Intelligent Parking Assist)にも貢献している。
昨今,交通事故低減をはじめとする安全・安心な自動車社会構築に向け,産官学がバレーパーキングに代表される自動駐車システム,さらには自動運転システムの実現をめざしている。
今後は,通信連携によるインフラ協調に対応することでリモートパーキングなどの自動駐車システムの進化に寄与する開発を進めるとともに,センシング範囲を拡大し,走行レーンや路面ペイント認識,ならびに看板・標識,交差点における歩行者の認識や巻き込み防止などの技術の開発を進め,自動運転システムへの貢献も検討していく5)。
図5|SurroundEye(サラウンドアイ)の進化
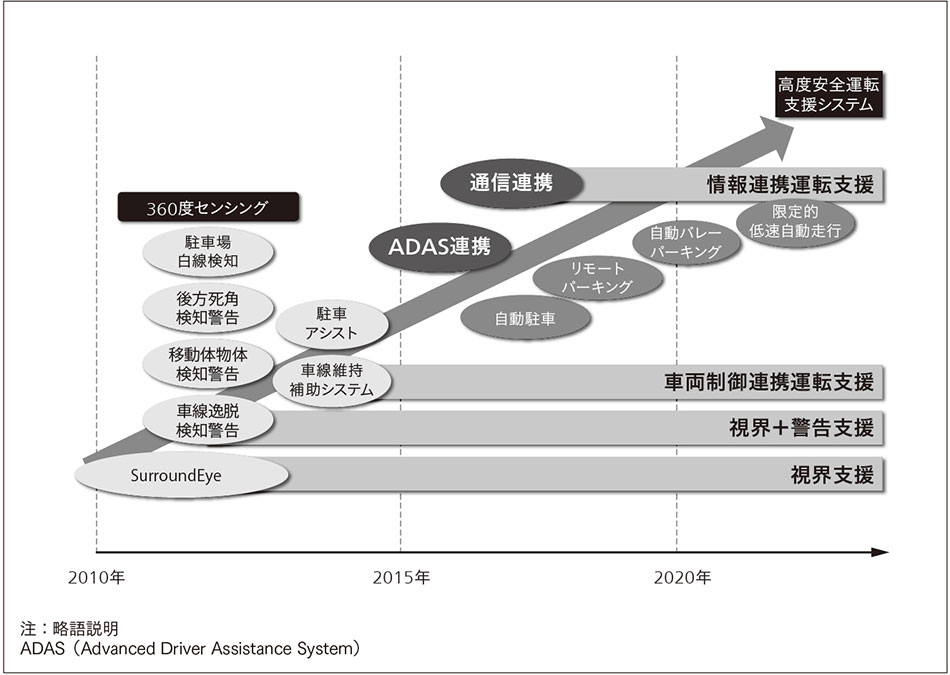 SurroundEyeは,駐車時のビューシステムをはじめ,自動運転にも必須のセンサーとして機能・性能を向上させていく計画である。
SurroundEyeは,駐車時のビューシステムをはじめ,自動運転にも必須のセンサーとして機能・性能を向上させていく計画である。
自動運転を実現するためには地図情報が必要である。例えば,交差点や分岐・合流の位置を先読みして走行する車線を選択したり,進行先の道路形状(カーブや坂道)に応じて車速を制御する際に必要となる。その地図情報を有効に活用するには,自車が地図上のどの場所を走行しているのかを正確に知ることが求められる。しかし,車載用途で一般的に用いられているGPS(Global Positioning System)で得られる自車位置には数メートルほどの誤差があり,GPSの電波受信状況が悪くなれば,それ以上の誤差が発生してしまう。このような状況でも自車位置を精度よく知るために,外界認識センサーで得られる情報を地図と照合して自車位置を推定する技術を開発した(図6参照)。
テストコースで走行実験を実施し,自車位置推定精度の改善を確認した。GPSのみでは4 mほどの誤差があったが,地図との照合により誤差を1 m程度に改善した。今後は車線境界線認識の困難な急カーブへの対応や,カメラ映像の変化による自車移動量推定を検討していく6)〜8)。
図6|センサーの認識結果と地図による車線境界線の照合
 車線境界線位置により横方向,カーブ形状の照合により進行方向の自車位置が補正される。
車線境界線位置により横方向,カーブ形状の照合により進行方向の自車位置が補正される。
ここでは,自動運転の実現に必要な車両周辺センシング技術の進展に関して最近の取り組みを述べた。
今後はこれらの技術を組み合わせ,自動運転の高度化に取り組んでいく。
