「つながるクルマ」で実現する自動運転技術
日立オートモティブシステムズ(株)は自動車の性能を左右するシャシー系製品,これらの製品をさまざまな制御技術と連携・協調させ,安全・快適性を向上させる車両統合制御システムを開発している。電動化/自動運転化時代を見据えた開発状況と将来の展望について述べる。





交通事故の撲滅は社会の不変の要請である。事故防止のために,横滑り防止装置(ESC:Electronic Stability Control)や自動緊急ブレーキ(AEB:Automatic Emergency Braking)が標準装備され,さらに,高速道路の同一車線をほぼドライバーが操縦しなくとも走行できる車も発売されている。このような高度運転支援システムや自動運転システムのほか,環境負荷低減のためのEV(Electric Vehicle)やHEV(Hybrid EV)などの電動車両システムの開発競争が激しさを増している。
日立オートモティブシステムズ株式会社は,コンベンショナルな製品で長年培った技術を基に,自動車の「走る」,「曲がる」,「止まる」の性能を左右するブレーキ,ステアリング,サスペンションの電子電動化を進めてきた。また,より安全で自動運転も可能にする環境センシング技術,知能化技術を開発している。これらの技術を協調させ統合制御することで,快適・エコ・安全性を高度に実現し,事故ゼロ,環境負荷ゼロの実現に貢献していく。
本稿では,車両の統合制御システムとシャシーコンポーネントの開発状況と将来の展望について述べる(図1参照)。
図1|車両統合制御のロードマップ 自動運転の発展に合わせてコンポーネントを進化させるとともにそれらを統合制御する技術を開発し,安全で快適な信頼性の高い車両システムを実現する。
自動運転の発展に合わせてコンポーネントを進化させるとともにそれらを統合制御する技術を開発し,安全で快適な信頼性の高い車両システムを実現する。
これまでの車両システムでは,ドライバーの運転に対して忠実かつ快適に「走る」,「曲がる」,「止まる」を実現することが求められ,エンジン,ブレーキ,ステアリング,サスペンションなどそれぞれに磨きをかけ進化させてきた。しかし,これからの時代,コンポーネントの電動化や電動車両が当たり前となり,ドライバーまでもが電子制御に代わる自動運転に対応するためには,車両運動すべてを統合して発展させることを考える必要がある。
そこで,多数のコンポーネントを最適に制御し,統合し,安全で快適な車両システムを提供する要として,車両統合制御コントローラを開発中である。車両統合制御コントローラは認知・判断に対する制御を一手に担い,さまざまなセンサーやコントローラから受ける制御指示を整合し,複数のコンポーネントを適切に制御する。その結果,低速大舵(だ)角が必要な自動駐車からレーンキープのような高速走行まで,あらゆるシーンでシームレスに快適な走行を実現する。また,車両統合制御コントローラはコンポーネント間の冗長性を有効利用し,失陥時の相互補完を行うことで信頼性を高める役割を担う。さらに上位コントローラが失陥した際のバックアップ機能も備えており,万が一上位コントローラからの指示が途切れても,予定された軌道を継続して自動運転走行しながら安全にドライバーに操作を引き継いだり,安全な退避経路を選んで安全に停車したりといった車両コントロールを実現する(図2参照)。車両統合制御コントローラがあることで,上位コントローラは行きたい方向・速度・軌道を指示するだけで車両システムが協調制御され,路面や車両状態に合わせた乗り心地が良く快適な走行が,高い信頼性をもって指示どおりに実現される。
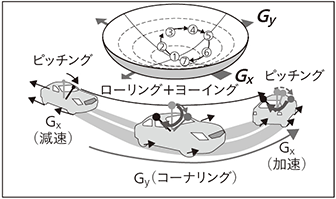
図2|車両統合制御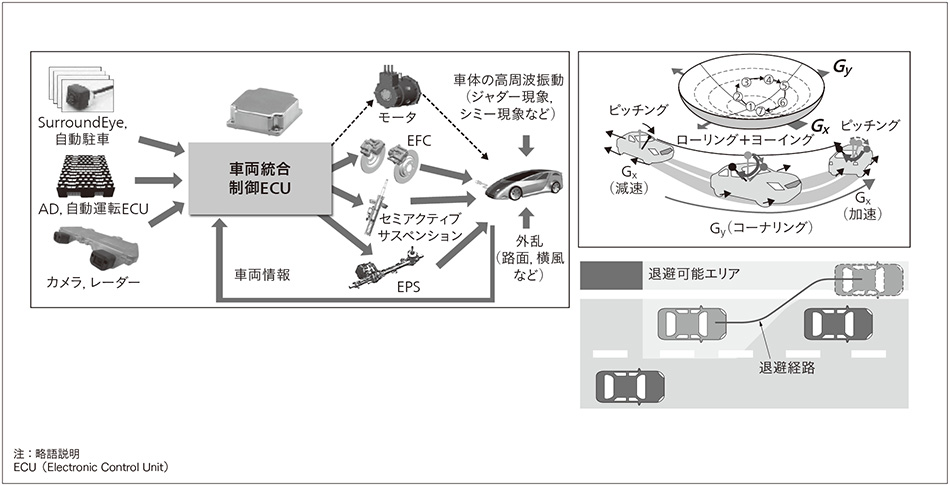 車両統合制御ECUは上位コントローラからの目標軌道に応じて車両走行を制御する(左)。各コンポーネントの操作を適切にマネジメントし安心・快適な車両挙動を実現する(右上)。上位コントローラ失陥時には自動運転を引き継ぎ,最も安全な経路を走行する(右下)。
車両統合制御ECUは上位コントローラからの目標軌道に応じて車両走行を制御する(左)。各コンポーネントの操作を適切にマネジメントし安心・快適な車両挙動を実現する(右上)。上位コントローラ失陥時には自動運転を引き継ぎ,最も安全な経路を走行する(右下)。
地球温暖化と大気汚染問題を背景として,自動車メーカー各社は環境負荷の少ない車両の開発を推進している。そうした環境対応のためには車両の電動化(HEV/EV)が効果的である。最近,欧州で2040年までに内燃機関車を販売禁止にするという発表がされるなど,電動化の動きが急速に進展している。
日立オートモティブシステムズは,HEV/EVの主要部品であるモータ・インバータ・バッテリー・負圧レス対応の制御ブレーキを製品として持っている。これらを組み合わせた際の協調制御や,実走行時の使い方に関するノウハウを得るため,前輪駆動(FF:Front Engine Front Drive)/後輪駆動(FR:Front Engine Rear Drive)/全輪駆動(4WD:4 Wheel Drive)の各種駆動系の実験車両を試作し,EVの制駆動制御や各種協調制御技術の開発を行い,電動車両の協調制御と実走行時の使われ方に関する知識を蓄積してきた。
図3に制御構造を示す前後2モータ4WD試作車両においては,各種協調制御および統合制御を組み込むことで,卓越した車両性能を実現することを確認している。今後はキーコンポーネントの供給のみならず,車両構築で培った技術を進化させ,性能評価・システム設計・開発効率技術を向上させ,開発ソリューションの提供につなげていく。
図3|前後2モータ4WD試作車両に組み込んだ車両統合制御の構造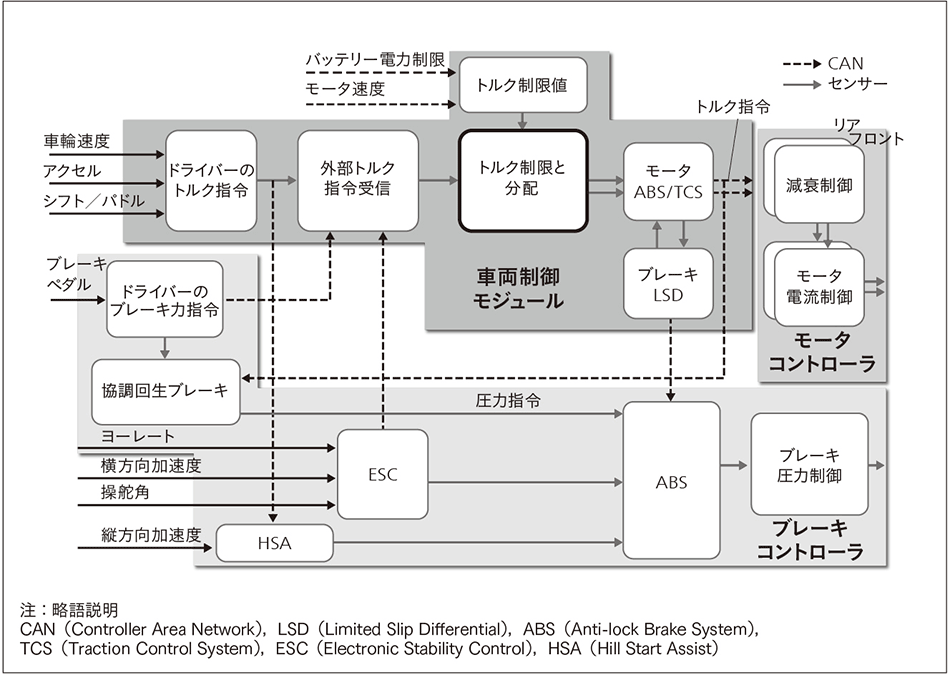 車両制御モジュールはモータコントロール(電力制御),ブレーキコントロール(挙動制御)の統合制御を実現する。
車両制御モジュールはモータコントロール(電力制御),ブレーキコントロール(挙動制御)の統合制御を実現する。
安全・エコ・快適な乗り心地の向上をめざしてブレーキシステムの電動化を進めている。これまでに,ESC,電動ブースタ,電動パーキングブレーキを製品化してきた。今後急速な拡大が予想される電動パワートレインや自動運転の要求に応えるため,ブレーキシステムにはこれまで以上に高い信頼性と応答性,制御性能が不可欠になる。一方,運転する楽しみを求める顧客にもより良いブレーキフィールを提供するため,車両側の制御とドライバーの操作を両立させることが可能なブレーキバイワイヤ(BBW:Brake by Wire)システムが必要と考え,開発を進めている。既存のBBWシステムは電動モータとポンプにより発生した液圧を利用する電動液圧方式があるが,応答性,制御性能を考慮すると直接電動モータで制動力を制御する電動機械方式(EFC:Electric Fist type Caliper)が最適と考えている。この電動機械式ブレーキを後2輪に採用することで微妙な制御が可能となり,安全・快適性能の向上などいろいろなメリットを提供できるため,前輪に高い信頼性を有する電動液圧BBW,後輪に高応答・高精度な電動機械BBWをそれぞれ配置したハイブリッド構成のシステムを開発している(図4参照)。前輪系は日立のブレーキマスターシリンダー(MCYL:Master Cylinder)やESC技術,後輪系は電動パーキングブレーキ技術を基本としており,短期間で十分な品質を確保し,顧客に提供可能な構成としている。本システムは既存の液圧システムに比べ,電力以外のエネルギーを必要としないうえ,回生エネルギーのリカバリー範囲が広くEV/HEVに最適なシステムと考えている。また緊急ブレーキ時の制動距離の短縮はもとより,高度な車両運動制御の実現,2種の方式を有する構成により冗長機能が得られ,自動運転に適したシステムといえる。さらにBBWのメリットであるブレーキフィールの自由度を生かし,顧客の嗜好に合致したフィールの生成や,自動運転からドライバー操作への移行時,違和感のないスムースなブレーキフィールの維持が可能である。このシステムにより,安全かつ環境に配慮した快適な乗り心地を提供する。
図4|Hybrid Brake by Wire構成図 前輪に電動液圧ブレーキバイワイヤー,後輪にEFCを採用した。ドライバーの操作や自動運転システムの要求を受けて,前輪と後輪を連携させながら,より高度なブレーキ制御を実現する。
前輪に電動液圧ブレーキバイワイヤー,後輪にEFCを採用した。ドライバーの操作や自動運転システムの要求を受けて,前輪と後輪を連携させながら,より高度なブレーキ制御を実現する。
近年,環境規制や省エネルギー指向が重要視されており,自動車自体およびその搭載システムの電動化が急速に進んでいる。ステアリングシステムも同様であり,乗用車では小型車から大型車に,ほぼ100%電動パワーステアリングシステム(EPS:Electric Power Steering)が搭載されている。電子技術の向上に伴って,EPSは大出力化が可能となり,より大きな大型SUV(Sports Utility Vehicle)や,小型トラックへと採用が拡大されている。
同時に,各自動車メーカーは自動運転に関する技術の市場投入にも力を入れており,車両の自動運転化が急速に発展する様相を見せている。この自動運転に対応するEPSとして,日立オートモティブシステムズは,安全面から,図5に示すようにFT(Fault Tolerant)設計システムを提案している。電気/電子系が冗長構成となっているため,万が一システムが失陥しても,50%の出力(正常側半系統)でEPS機能が継続できる構成を採っている。また,性能面では,自動運転中は外部コントローラから指令を受け,EPS内部ソフトウェアでアシスト機能から転舵機能システムに切り替える機能を有し,高精度な舵角制御を可能にしている。
図5|冗長化電動パワーステアリング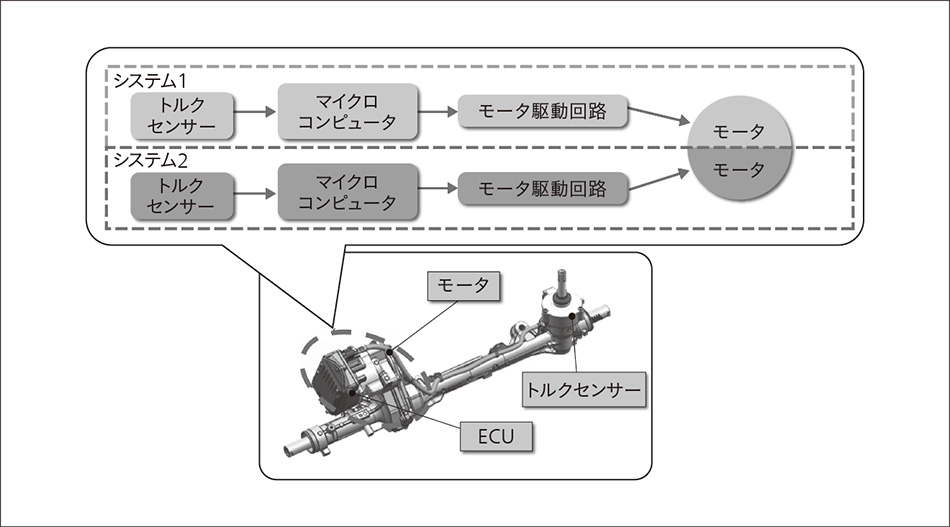 構成される電気/電子部品を冗長化することにより,失陥時においてもステアリング機能を失わないシステムとしている。
構成される電気/電子部品を冗長化することにより,失陥時においてもステアリング機能を失わないシステムとしている。
今後は自動運転の普及に伴い,このFT設計のEPSが普及する1)と考えており,現在量産に向け開発を行っている。さらに将来,自動運転レベルの向上とともに,より高度なFT設計が要求され,システムが失陥しても100%の機能維持が求められるシステムが必要となってくる。これらに対応できるように,さらに高度なFT設計のEPSを開発し,市場ニーズに応えていく。
自動車のサスペンションは,路面からの入力を抑制する「乗り心地性能」や,ハンドリング時の車両の安定性を向上させる「操縦安定性性能」に寄与する重要なシャシー部品である。
最近は,高性能化に向けて制御サスペンションでは制御ブレーキシステムやEPSとの協調,統合制御が普及しはじめている2)。また,近い将来の自動運転に向けたさらなる高性能化が必須で,乗り心地を一層進化させた「居心地の良さ」が求められている。一方で普及車両に向けて,高性能,低価格な制御サスペンションや,基幹製品であるコンベンショナルダンパの基本性能向上,開発リードタイム短縮の技術開発も進めている。
自動運転の特にレベル4以降の自動車の乗り心地には,前述のように「居心地の良さ」が求められる。現在の自動車は助手席や後部座席に乗っていて乗り物酔いをする場合があり,居心地の良さの面では課題がある。求められるのは新幹線のような乗り心地であり,日立は走行中の横加速度の低減を提案している。最新の鉄道では,カーブでの発生横加速度0.9 m/s2以下が要求されている3)。自動車のサスペンションでこれを実現するための手段としては,ロール角の制御が現実的であり,日立オートモティブシステムズは低コスト化も考慮して,エアサスペンションと制御サスペンションの組み合わせを提案している(図6参照)。
図6|エアサスペンションとセミアクティブサスペンションでのロール制御による横加速度の低減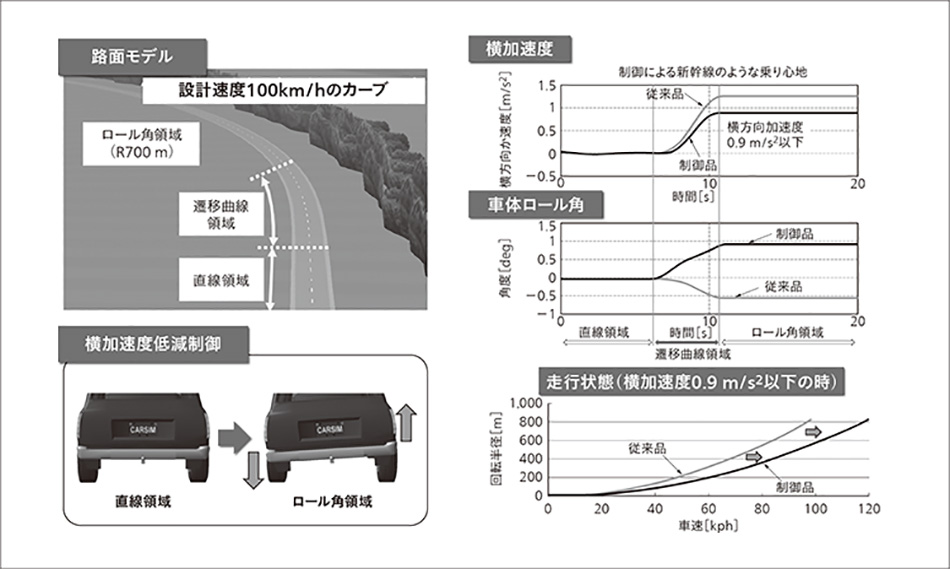 カーブ走行時に,エアサスペンションにより通常とは逆のロール角を発生させ,乗員が感じる横加速度を低減させる。
カーブ走行時に,エアサスペンションにより通常とは逆のロール角を発生させ,乗員が感じる横加速度を低減させる。
セミアクティブサスペンションは,車体やサスペンションストロークならびにハンドル操作などに応じて,リアルタイムかつ連続的に減衰力を制御することで振動や余計な車体の動きを抑制する。具体的には,バウンシング,ピッチング(1〜2 Hz),ハンドリング時には適度に減衰力を上げ,不快に感じる2 Hz以上の周波数帯では適度に減衰力を下げるように制御する。
日立オートモティブシステムズは独自のバルブ構造を採用し,幅広い減衰力可変幅と高い応答性を実現したセミアクティブサスペンション用ダンパを開発し,上級車を中心に採用が拡大してきた。今後は,自動運転で要求が高まる上質な乗り心地,「居心地の良さ」の実現のために,広い車両カテゴリーでの採用拡大が期待されると同時に,低価格化の要求もさらに高まることが予想される。これに備え,コンベンショナルダンパと置き換え可能な,減衰力制御バルブ内蔵型セミアクティブサスペンション用ダンパを開発している。また,日立オートモティブシステムズ独自のサスペション制御アルゴリズムである4)BLQ(Bi-linear Optimal Control)制御を基に,専用の加速度センサーや,車高センサーを使わないセンサーレス制御を開発中であり,シンプルなシステム構成で高性能なセミアクティブサスペンションシステムを実現する(図7参照)。
図7|従来のバルブ外付けタイプとバルブ内蔵タイプのセミアクティブ用ダンパの比較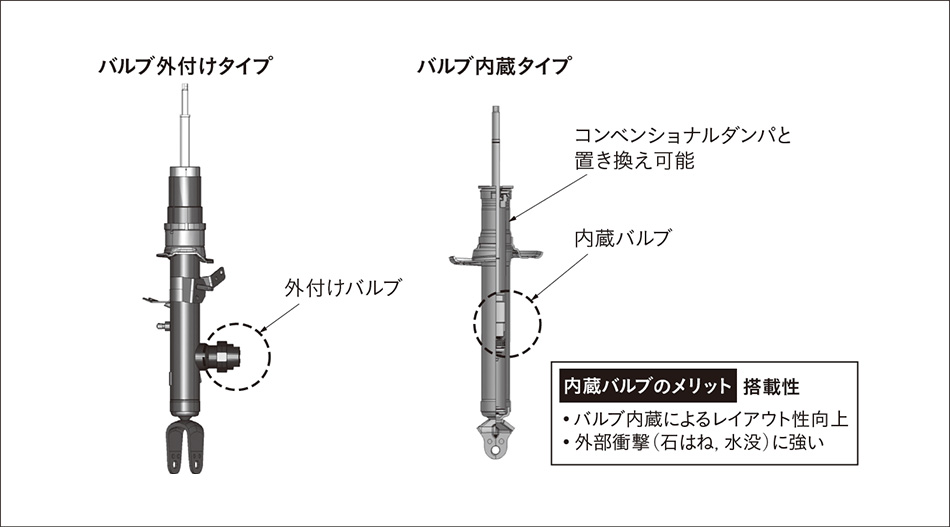 バルブ内蔵タイプダンパは,コンベンショナルダンパと外寸が同様で置き換えが容易であり,バルブが内部にあるため外からの衝撃(石はね,水没)に強い,といったメリットがある。
バルブ内蔵タイプダンパは,コンベンショナルダンパと外寸が同様で置き換えが容易であり,バルブが内部にあるため外からの衝撃(石はね,水没)に強い,といったメリットがある。
ベースとなるコンベンショナルダンパの商品力向上のため,基本性能向上,開発のリードタイム短縮も重要な課題として取り組んでいる。各要素部品の機能・性能の分担を見直し最適化することで基本性能を向上させる。また,解析技術を活用して,「要素部品特性・ダンパの減衰力特性・車両挙動・乗り心地官能評価」を予測できる一連のシステムを開発している(図8参照)。これにより,設計,車両適応(チューニング)の時間を大幅に短くし,自動車メーカーの車両開発リードタイム短縮に貢献していく。
図8|解析主導型ダンパ開発システム構想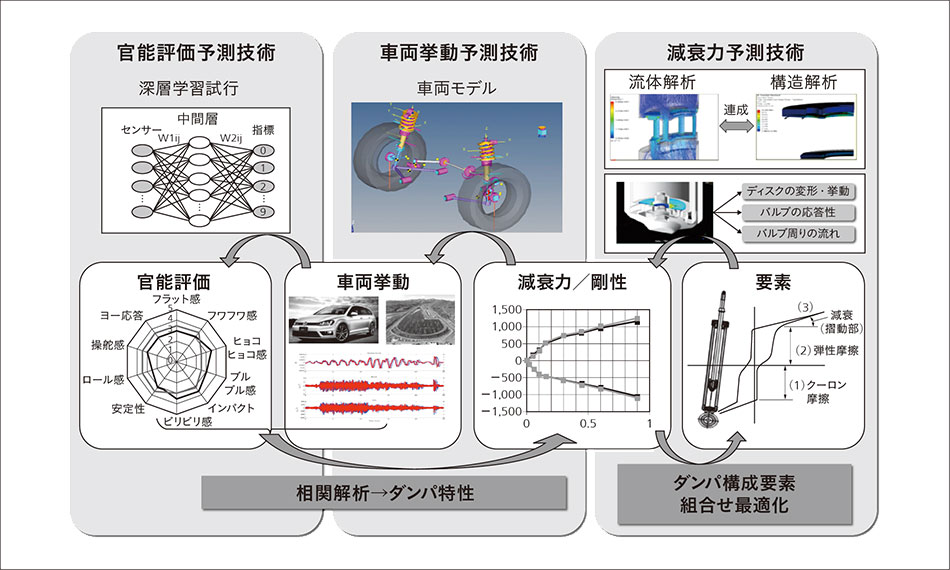 解析主導により,減衰力性能や車両性能の予測技術を向上させ,設計開発リードタイム短縮に貢献する。
解析主導により,減衰力性能や車両性能の予測技術を向上させ,設計開発リードタイム短縮に貢献する。
自動運転対応車両統合制御,電動車両統合制御,ブレーキ,サスペンション,ステアリングシステムを挙げて,車両統合制御の開発状況と将来展望について述べた。
シャシーコンポーネントは重要保安部品が多く,各サブシステムには高い信頼性が求められる。そして,これらをほかのシステムと協調して統合的に制御するには高い機能安全性能が不可欠である。車両統合制御の進化により,自動車の高い安全性,環境性能,快適性能を実現していく。