�u�Ȃ���N���}�v�Ŏ������鎩���^�]�Z�p
�z�R�e�ЂŐ��Y�������オ�����]�܂�钆�C�������@�i���j�͓S���ŗp������ǐ���Z�p�����p���A��葽���̎ԗ��𐧌�ł��C�ߍ��ȒʐM���ł��p���I�ȉ^�p�\�ȃ_���v�g���b�N�����^�]�V�X�e�����J�������B�I�[�X�g�����A�����T�C�g�ł̎��@���ȂǁC���̊J���ߒ����Љ��B


����������i�C������Ď������i�͂������N�Ⴂ�����Ő��ڂ��Ă���C�z�R�ƊE�ł͂��Ắu�@��Ζׂ���v���ォ��u�����c����������ϊv�v�̎���ւƓ]���𔗂��Ă���B�܂��C�z�R�͖{���I�Ɋ댯�ȐE��ł���C�]�ƈ��̈��S�m�ۂ��ۑ�ƂȂ��Ă���B���̂悤�ȏ��ŁC�z�R��Ђł͍z�R�̈��S�����܂߂čz�R�^�c�̑S�̍œK���ɂ����������C�C�m�x�[�V�����ɂ�邳��Ȃ鑀�ƃR�X�g�̒ጸ�ȂǁC���Y�R�X�g�̓O��I�ȍ팸�ƌ����������߂��Ă���B���̂悤�ȍ�������i�̈�Ƃ��āC�_���v�g���b�N�����^�]�V�X�e���iAHS�FAutonomous Haulage System�j�����ڂ���Ă���B
AHS�́C�}1�Ɏ����悤�ɁC�I�V�@��z�R�̒��ōł��l����v����_���v�g���b�N�l�����āC�ǐ��V�X�e�����瓝���Ǘ����邱�Ƃōz��y���̔����E���y��Ƃ��s�킹����̂ł���B�_���v�g���b�N�l�����邱�Ƃɂ��C�l�����}���ł��邾���łȂ��C�x�e���ԁE�V�t�g��㎞�Ԃ��Ȃ������Ƃɂ��ғ����Ԃ̊g��C�@�B���䂳�ꂽ�����I���K���ȑ��s�ɂ��R��̒ጸ�C�@�B���������Ȃǂ̌o�ϓI�����b�g�������܂��B�܂��C�@�B����Ƃ��邱�ƂŃ_���v�g���b�N�̑��s�ɂ�����l�דI�~�X������C���S���̌�������҂ł���B����ɂ́C���Y�Ǘ��V�X�e���ƘA�����������v���Z�X���Ǘ����邱�ƂŁC�z�R�^�p���̂̌��������\�Ɗ��҂���Ă���B
�}1�bAHS�̊T�v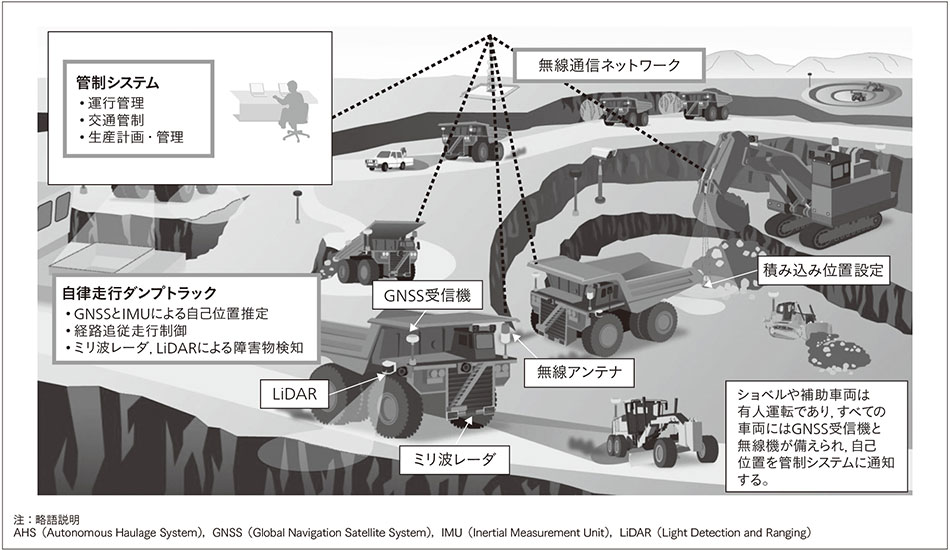 ���l�����ꂽ�_���v�g���b�N�́CGNSS��e��Z���T�[��p���Ď������s����B�ǐ��V�X�e���͊e�_���v�g���b�N�Ɩ����ʐM���邱�ƂŁC�ԗ��S�̂̉^�s�Ǘ��C��ʊǐ����s���B�z�R����ɂ͐l���^�]����V���x����u���h�[�U�C�O���[�_�Ȃǂ̕⏕�ԗ����������C���l�̃_���v�g���b�N�ƘA�g����K�v������B
���l�����ꂽ�_���v�g���b�N�́CGNSS��e��Z���T�[��p���Ď������s����B�ǐ��V�X�e���͊e�_���v�g���b�N�Ɩ����ʐM���邱�ƂŁC�ԗ��S�̂̉^�s�Ǘ��C��ʊǐ����s���B�z�R����ɂ͐l���^�]����V���x����u���h�[�U�C�O���[�_�Ȃǂ̕⏕�ԗ����������C���l�̃_���v�g���b�N�ƘA�g����K�v������B
AHS�ɂ����ʂ́C�����̃_���v�g���b�N��L�����K�͍z�R�ŃX�P�[�������b�g���������߁C�ł��邾�������̃_���v�g���b�N���^�p�ł��邱�Ƃ����߂���B�������C�ǐ��V�X�e���ƃ_���v�g���b�N�����Ԗ����ʐM�̗e�ʂɂ�萧��\�Ȏԗ��䐔�������B���ɁC�e�ԗ��̈ʒu�������A���^�C���ɔc�����Đ��䂷��ԗ��ʒu�x�[�X�̐�������ł́C�ʐM�ʂɂ�鐧�����ƂȂ�B�����ŁC�������@������Ђł͓S���ŗp�����Ă���ǐ���Z�p�����p���邱�ƂŊǐ��V�X�e���Ƃ̒ʐM��}�����C��葽���̎ԗ��䐔�𐧌�\�Ƃ����B
����ŁC�L�l�I�y���[�V�����̌������C��AHS�ɐ�ւ���̂ɂ͑傫�ȓ������K�v�ł��胊�X�N���������Ƃ���C�L�l�I�y���[�V������i�K�I��AHS�ɐ�ւ����邱�Ƃ����߂��Ă���B����ɑ��āC�������@�ł͗L�l�p�̃_���v�g���b�N���ȒP�ȉ����Ŏ������s�_���v�g���b�N�ɕς����郌�g���t�B�b�g�Ή��V�X�e���őΉ����Ă���B����ɂ��C�ڋq�̌���ł͗L�l�p�Ƃ��čw�������_���v�g���b�N�������I��AHS�����邱�Ƃ��\�ƂȂ�B�����̓������x����Z�p�̏ڍׂɂ��Ĉȉ��ɏq�ׂ�B
�}2�b�ǐ���ɂ��ԗ��̌�ʊǐ�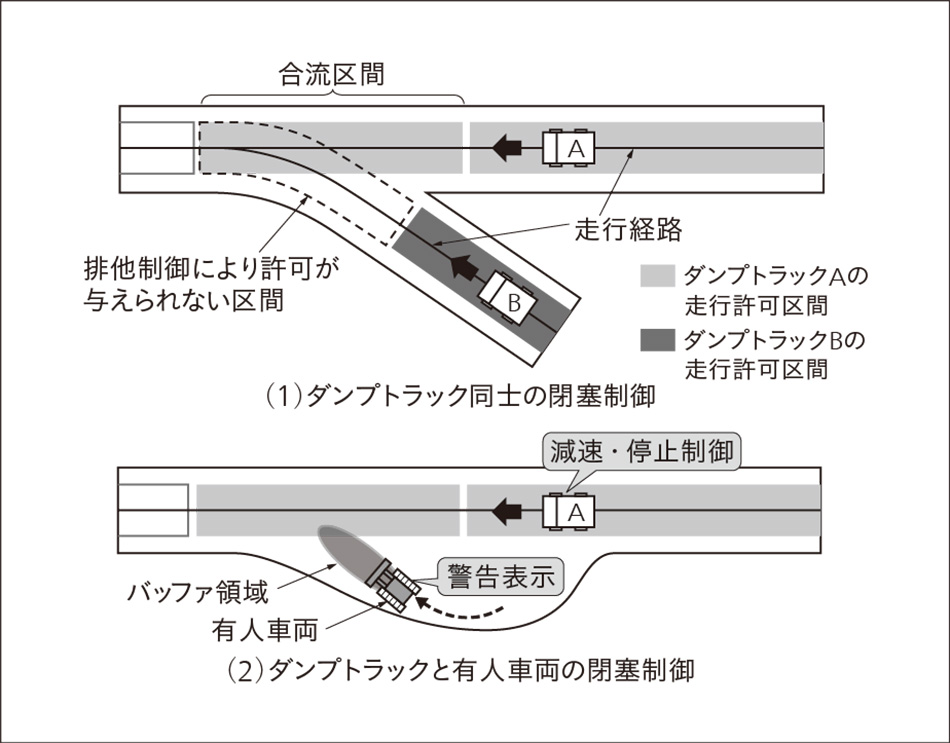 ���s����Ԃɂ��ԗ��������̈��r���I�ɐ��䂷�邱�ƂŁC�ԗ��Ԃ̊����������B
���s����Ԃɂ��ԗ��������̈��r���I�ɐ��䂷�邱�ƂŁC�ԗ��Ԃ̊����������B
�ǐ���ł́C�_���v�g���b�N���Ǐ]���s���鑖�s�o�H���̋�Ԃɕ������C�X�̋�Ԃ̑��s��1��̃_���v�g���b�N�ɔr���I�ɋ����邱�ƂŃ_���v�g���b�N���m�̊���h���B�_���v�g���b�N�͑��s�����^����ꂽ��ԁi���s����ԁj���ɂ����ẮC�ǐ��V�X�e���ƒʐM���邱�ƂȂ����s���邱�Ƃ��ł���B�_���v�g���b�N�����s����Ԃ̏I�[�ɋ߂Â����玟�̋�Ԃ̑��s�����ǐ��V�X�e���ɗv�����C��������ꂽ�瑖�s���p������B�}2�i1�j�̗�ł́C������Ԃɂ����ă_���v�g���b�NA�ւ̑��s�������łɗ^�����Ă���̂ŁC�_���v�g���b�NB�ւ̑��s�����^����ꂸ�C������������B
�܂��C�L�l�ԗ��ɂ��ẮC�Œ�I�ȑ��s�o�H�̐ݒ肪����ł��邽�߁C���s����ԂŊǗ������C�L�l�ԗ������l�̃_���v�g���b�N�̑��s����Ԃɓ���Ȃ��悤�ɗL�l�ԗ��̃I�y���[�^���K�C�h����B��̓I�ɂ́C�L�l�ԗ��̎ԍڒ[���Ƀ_���v�g���b�N�̑��s����Ԃ�\��������ƂƂ��ɁC���}�i2�j�Ɏ����悤�ɗL�l�ԗ��̐i�s�����ɐݒ肳�ꂽ�o�b�t�@�̈悪���s����ԂƏd�Ȃ�����x����\�����C�����Ɋǐ��V�X�e���̎w���Ń_���v�g���b�N�������E��~�����Ċ����������B
�\1�b��������ɂ�鐧��\�ԗ��䐔�̔�r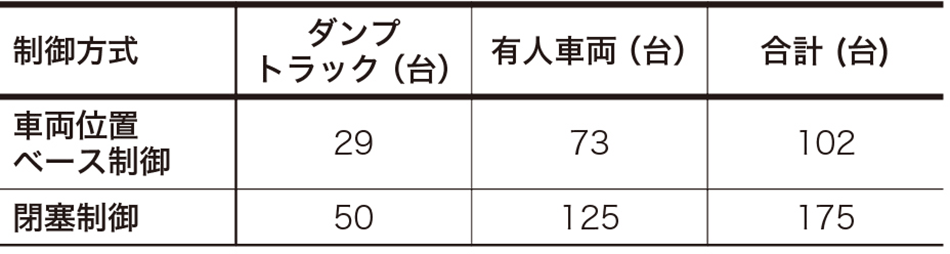 ����ʐM�������ł̐���\�ԗ��䐔�̎��Z��������B�_���v�g���b�N�ƗL�l�ԗ��̔䗦��1�F2.5��z�肵�Ă���B
����ʐM�������ł̐���\�ԗ��䐔�̎��Z��������B�_���v�g���b�N�ƗL�l�ԗ��̔䗦��1�F2.5��z�肵�Ă���B
�ǐ���ł́C�_���v�g���b�N�̈ʒu�����p�x�Ŕc������K�v���Ȃ����߁C�ǐ��V�X�e���ֈʒu����ʒm���邽�߂̒ʐM�ʂ��팸���邱�Ƃ��ł���B�\1�́C���p�x�Ŏԗ��ʒu��c������ԗ��ʒu�x�[�X����ƕǐ���ɂ��ē���ʐM�������Ő���\�Ȏԗ��䐔�����Z������ł���B���̎��Z��ɂ��C�ǐ���ł͎ԗ��ʒu�x�[�X����ɔ�ז�1.7�{�̎ԗ��𐧌�\�ƌ����܂��B
�������@��EH-3�^�V���[�Y�̃}�C�j���O�_���v�g���b�N�ɂ́C���s���\�E���쐫�\�̍���AC�iAlternating Current�j�쓮����ɉ����Ďԑ̈��艻���䂪���ڂ���Ă���1�j�B����ɂ��C����₷���H�ʏ�Ԃ�C�}�Ȕ��i�E�����ɂ����Ă��ԑ̎��̂����s�̈��艻��}�邽�߁CAHS���ɍۂ��Ă͒P���ȃA�N�Z���w�߂Ƒ��ǁi���j�w�߂��C���^�t�F�[�X�Ƃ���AHS�A�h�I�����j�b�g�𓋍ڂ��邾���ŁC�L�l�p�̃_���v�g���b�N���������s�_���v�g���b�N�ɕς��邱�Ƃ��ł���i�}3�Q�Ɓj�B
�}3�b�L�l�p�_���v�g���b�N�̎�����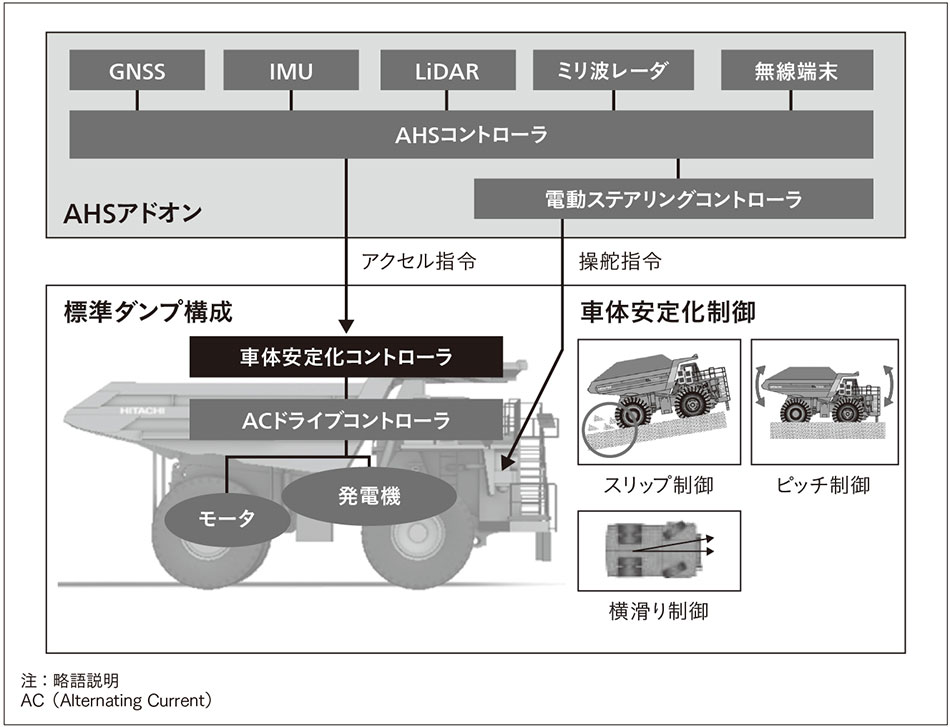 �ԑ̈��艻�R���g���[���̓��ڂɂ��ԑ̂̈��艻�@�\�ɂ��C�L�l�p�_���v�g���b�N���ȒP�Ɏ������s�_���v�g���b�N�����邱�Ƃ��\�ł���B
�ԑ̈��艻�R���g���[���̓��ڂɂ��ԑ̂̈��艻�@�\�ɂ��C�L�l�p�_���v�g���b�N���ȒP�Ɏ������s�_���v�g���b�N�����邱�Ƃ��\�ł���B
AHS�̋Z�p�J���E���ɍۂ��ẮC�_���v�g���b�N��p�����ςݍ��݁E�����E���y�̃I�y���[�V�������Č�����K�v�����邪�C��K�͍z�R�̃I�y���[�V�����őz�肳���100��K�͂̎ԗ���p�����������̍\�z�͌����I�ɂ͗e�Ղł͂Ȃ��B�����ŁC�}4�Ɏ����悤�ȃn�C�u���b�h�V�~�����[�^���\�z���ĊJ���E�����s���Ă����B
�}4�b�n�C�u���b�h�V�~�����[�^�̊T�v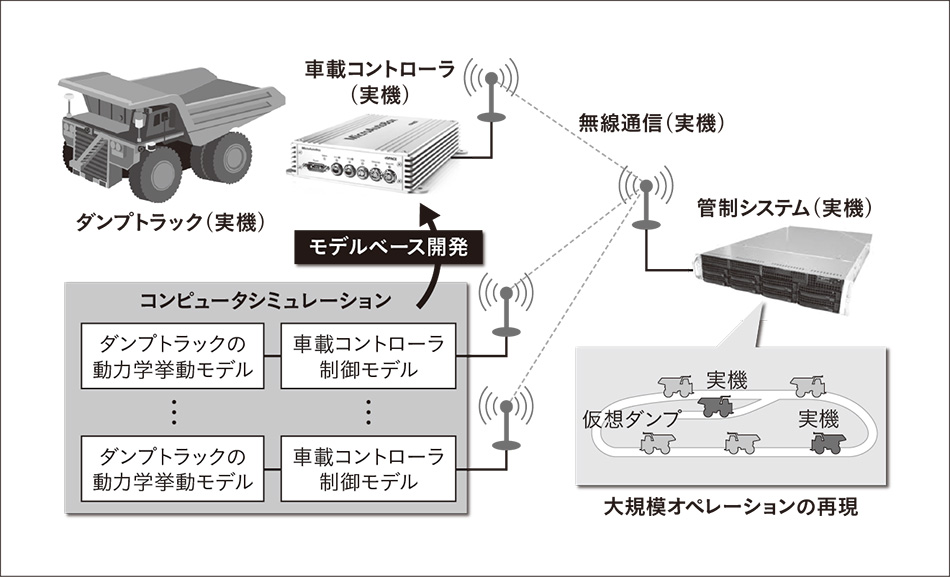 ���@�_���v�g���b�N�ƃV�~�����[�V�����ɂ�鉼�z�_���v�g���b�N�̑g�ݍ��킹�ő�K�̓I�y���[�V�������Č������B
���@�_���v�g���b�N�ƃV�~�����[�V�����ɂ�鉼�z�_���v�g���b�N�̑g�ݍ��킹�ő�K�̓I�y���[�V�������Č������B
���̃n�C�u���b�h�V�~�����[�^�ł́C�ǐ����s���T�[�o�����Ɗǐ�����̎w�����_���v�g���b�N�ɓ`���閳���ʐM�̕����͎��@��p���C�_���v�g���b�N�̕����ɂ��Ă͎��@�ƃV�~�����[�^�����݂�����B�܂��C�ԍڃR���g���[���̐��䃍�W�b�N�ɂ��ẮC�V�~�����[�^��ŊJ���������䃂�f�������̂܂��@�ɓ��ڂ��郂�f���x�[�X�J���̎�@��p����B
���̃n�C�u���b�h�V�~�����[�^��p���邱�ƂŁC�J�����Ԃ��Z�k�ł��邾���łȂ��C�V�~�����[�^�Ŗ͋[����鉼�z�_���v�g���b�N�ƍ��킹��100��K�͂̍z�R�I�y���[�V�������Č��E�����邱�Ƃ��ł���B����ɁC�J���̏����i�K�ł́C���@�_���v�g���b�N�Ɖ��z�_���v�g���b�N�̑g�ݍ��킹�Ō�ʊǐ��̎������s�����Ƃɂ��C�����ɂ�������S�����m�ۂ��邱�Ƃ��ł���B
�I�[�X�g�����A�̓d�͊��Stanwell�ЁiStanwell Corporation Limited�j�̋��͂āC�I�[�X�g�����A�����̃u���X�x�������100 km�����ɓ��Ђ����L����Meandu�ΒY�z�R���Ɏ����T�C�g���\�z�����B���T�C�g�ł́C1�����̐ςݍ��ݏ�C3�����̕��y�������C���y��͊R�ォ��̓y�������C���n�ւ̓y���W�J�C����єj�Ӌ@�ւ̍z�Γ������͋[�ł������p�ӂ����i�}5�Q�Ɓj�B���̎����T�C�g�ɁC�O�͂ŏq�ׂ��ǐ��V�X�e���C�_���v�g���b�N�V�~�����[�^�C����ю��@�_���v�g���b�N3�䂩�琬��n�C�u���b�h�V�~�����[�^���\�z�����B�_���v�g���b�N�ɂ́C�����_���v�g���b�N�ɉ�������EH5000AC-3���C�y����ςݍ��ރV���x���ɂ�EX3500��p���Ă���B
�������T�C�g�ɂāC����܂łɃ_���v�g���b�N�ɂ��o�H�Ǐ]���s�@�\�C�ʒu���ߒ�~�@�\�C���y�@�\�C�V���x���ɂ��ςݍ��݈ʒu�̎w��Ɛςݍ��݈ʒu�܂ł̑��s�o�H�̎��������@�\�C��������@�_���v�g���b�N�Ɖ��z�_���v�g���b�N��p�����ǐ���@�\�̊m�F�Ȃǂ��s���C�ςݍ��݁E�����E���y���琬���A�̍z�R�I�y���[�V�����������\�ł��邱�Ƃ��m�F���Ă���i�}6�Q�Ɓj�B
�}5�b�I�[�X�g�����A�ɍ\�z�������@������ 1�����̐ςݍ��ݏ�C3�����̕��y�������C�ςݍ��݁E�����E���y�̈�A�̍z�R�I�y���[�V�������Č������B
1�����̐ςݍ��ݏ�C3�����̕��y�������C�ςݍ��݁E�����E���y�̈�A�̍z�R�I�y���[�V�������Č������B
�}6�b�I�[�X�g�����A�����T�C�g�ł̎��@�����̏�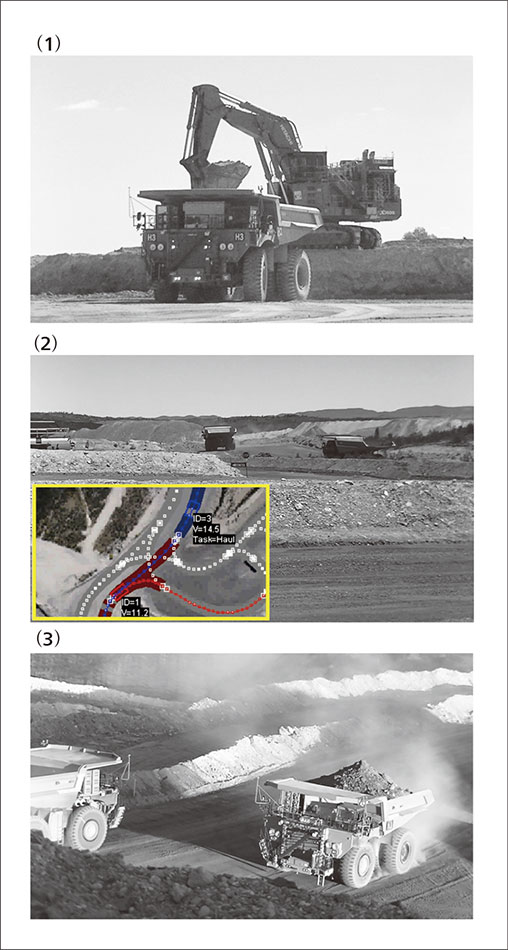 (1)�ɃV���x�����w�肵���ςݍ��݈ʒu�Ɉʒu���߂���_���v�g���b�N���C(2)�ɕǐ���ɂ������_�ł̍����̗l�q���C(3)�ɓy����ύڂ��đ��s����_���v�g���b�N�����ꂼ�ꎦ���B
(1)�ɃV���x�����w�肵���ςݍ��݈ʒu�Ɉʒu���߂���_���v�g���b�N���C(2)�ɕǐ���ɂ������_�ł̍����̗l�q���C(3)�ɓy����ύڂ��đ��s����_���v�g���b�N�����ꂼ�ꎦ���B
�{�e�ŏЉ��AHS�̊J���́C�����T�C�g�̉^�c��S���������@�I�[�X�g�����A�iHitachi Construction Machinery Australia Pty., Ltd.�j�C�ǐ��V�X�e���̒��œ��ɉ^�s�Ǘ���S���J�i�_��Wenco��2�j�C3�j�iWenco International Mining Systems Ltd.�j�Ƃ�3�ɑ̐��Ői�߂��Ă����B�܂��C�v�f�Z�p�̊J���ł́C�������쏊���͂��ߓ����O���[�v�e�Ђ̋Z�p�����p����Ă���B����́C�����̑��͂����CAHS���j�Ƃ����ڋq�\�����[�V�������Ƃւ̓W�J��}���Ă����B
