
はじめに
自動運転車とその技術がさらに進化し,技術的に洗練されていく中,既存の安全試験の範囲を大幅に超えてこれらの新しいロボットカーの安全性と信頼性を測定できる評価手順の開発が必要となる。フィールド試験で正確な評価を得るには,試験車は許容レベルの確実性を達成するために,数百万マイル(1マイルは約1.6 km)または数十億マイルも運転する必要がある。これは,数千万ドルの費用と,膨大な時間のかかる可能性があるプロセスである。
それに代わるものとして,Mcityに属している研究者は,自動運転車が応答する必要がある潜在的に危険な運転状況のみを抜き出し,何マイルにも及ぶ順調な運転アクティビティを除外した加速評価プロセスを開発し,迅速でより費用のかからないプログラムを作成している。このアプローチは,必要な試験の量を300分の1から10万分の1に減らすことができる。つまり,この試験で1,000マイル走行した自動運転車は,実世界の30万マイルから1億マイルの走行に相当する。
この技術を完成させるには,さらに研究開発を実施する必要があるが,加速化評価手順は,自動運転車の展開に不可欠な,安全で効率的な試験を実現する革新的なソリューションを提供している。
Mcityについて
ミシガン大学のMcityは,コネクテッドカー・自動運転車への移行を主導している。世界的に有名な研究者が在籍し,ユニークな試験施設,公道走行実験を特長とするMcityは産官学の連携により社会の利益のために輸送の安全,持続可能性,利用可能性を向上させている。
自動運転車試験方法の開発における課題
ロボットカー(運転手不要の自動車)の登場により,自動車メーカー,規制当局,都市計画者は,車両のソフトウェアおよびハードウェアの設計から,道路インフラの再設計,さらに事故の潜在的な責任に関する課題の多い法的問題の明確化に至るまで,いくつもの課題に直面している。
しかし,消費者が自動運転車,特にドライバーがまったく制御しない自動車を受け入れるようになるには,このような「未来の自動車」を購入し,運転する人々に車両の信頼性と安全性を確信してもらう必要がある。
今日の自動車やトラックの安全試験は,明確かつ標準化された取り組みである。例えば,耐衝撃性については,試験車両を準備し,衝突試験用ダミーとセンサーを搭載してテストスレッドに置き,ビデオカメラを回して自動車が壁に当たったときの状況を確認する。ロールオーバー脆(ぜい)弱性の場合は,明確に定義された複数のステアリング操作を実施し,動的車両試験の結果を使用し,車両の形状と重量配分を加味してロールオーバー「スコア」を算出する。結果は容易に測定され,自動車の購入者,政府の規制機関,保険会社が納得する方法で再現することができる。
耐衝撃性試験は,特定の速度,特定の方法で自動車を衝突させたときに何が発生し,乗員がどのように傷害を負ったかなど単一のイベントの結果を測定する。耐転覆試験では,転覆の傾向について評価する。しかし,試験用ダミーの腕が破損するかどうかを確認することは容易でも,自動運転車の反応についてあらゆる種類の不確実性を正確に測定することは,非常に困難である。従来の方法で運転される自動車の試験方法は,医師が患者の血圧や心拍数を測定するようなものであるのに比べ,自動運転車の試験はIQテストを受けさせることに近い。交通条件や道路条件,天候,時刻,他車の予測できない動きなどの変数が示す値は,絶えず複雑に変化するため,自動運転車はこれらの変数の変化を認識・処理して,適正で安全な選択を行う必要がある。
実際には,この種の試験をどのように設計するかという問題はさらに複雑である。自動運転車の試験では,「衝突で何が起こるか?」と問う代わりに,どのように効果的に衝突を防げるかを測定しなければならない。
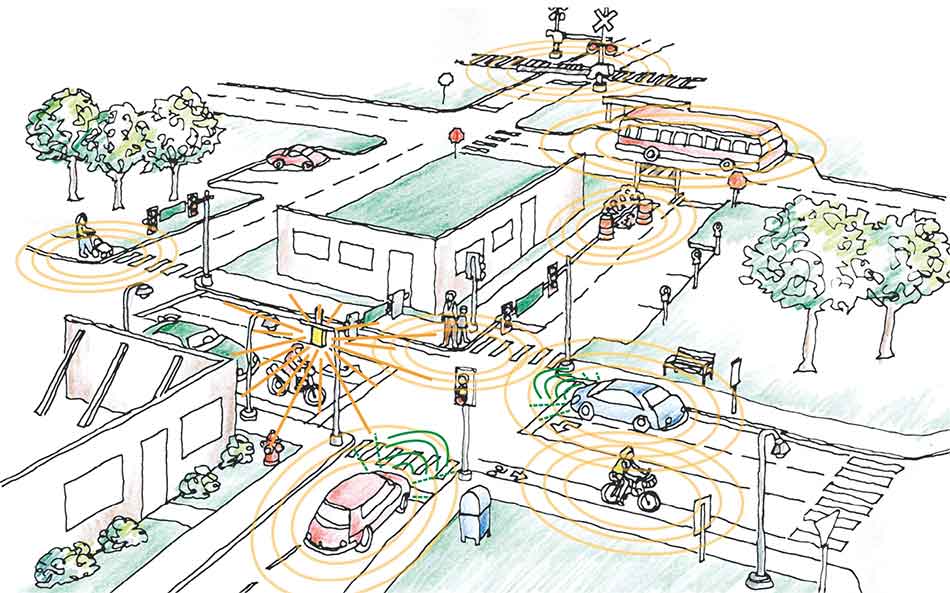
これらの課題に加えて,自動運転車が導入されても,自動運転車によって道路が占領できるわけではないという事実がある。新型ロボットカーは,人が運転する車両と道路を共有するのである。コネクテッドカー・自動運転車どうしは,通信で連絡を取り合いながら衝突を回避できたとしても,2006年型ピックアップトラックのドライバーがコーヒーをひざにこぼしてしまい,隣の車線に進路変更しようして鳴らすクラクションにはロボットカーが気付かないかもしれない。
このようなあらゆる因子が,メーカーにとって予測不可能なため,変化の激しい実世界の運転状況を正確に表し,再現する自動運転車の試験をどのように開発するかという大きな課題となる。これは,車両試験のエンジニアがこれまで経験したことをはるかに超える問題である。事前に定義されたテストシナリオの使用したテストマトリクスに基づく旧来の評価プロセスではもはや通用しない。根本的に異なる革新的な方法が必要である。
 米国自動車業界に大きな影響力を持つMcityのテストコース
米国自動車業界に大きな影響力を持つMcityのテストコース
車両試験を加速するためのアプローチ
自動運転車が消費者に受け入れられるには,試験で80%の信頼レベルを得ること,つまり,路上においてロボットカーのほうが人間の運転する車両よりも90%安全性が高いことを証明する必要がある。高い信頼レベルを得るためにシミュレーション設定または実世界の設定で試験車両が走行する必要がある距離は110億マイルに上るであろう。
また,真の安全性を実現するには,ロボットカーは,稀にしか発生しない危険な運転状況にも適切に対応できる必要がある。米国運輸省道路交通安全局によれば,警察に報告するほど重大な事故シナリオ(一般的に車両の損害賠償額が1,000ドル以上の事故)は,運転距離53万マイルごとに1回発生しており,死亡事故は1億マイルに1回である。
ここで,1年間に約1万2,000マイル走行する典型的ドライバーを考えてみよう。運転条件がより複雑で,混雑した交通での速度範囲が10 mph(約16 km/h)から25 mph(約40 km/h)までの都市環境では,試験ドライバーを8時間交代で配置しても200マイル以上の対象データを収集することはできないであろう。このペースで200万マイルに達するには27年以上かかる。印象的には偉業かもしれないが,現実的には必要をまったく満たしていない。試験を1日24時間の3交代制にしても,200万マイルに達するには約3,300日,9年以上かかる。
これには多くのドライバー,ガソリン,車両と修理を必要とする。しかし,そこまでしても,重大なイベントに関するデータ量は少ない。事故統計によると,注目すべき有用なインシデントデータは運転距離約10万マイルに1回しか得られないことが分かっているからである。つまり,自動運転車を試験するために今日最も先進的かつ大規模に労力を費やしても,これらのロボットカーを徹底的に試験するために必要な内容を得るには遠く及ばない。
この問題に対応するために,ミシガン大学のエンジニアは「加速縦断評価(Accelerated Longitudinal Evaluation)」の概念を適応させようと試みた。この概念は自動車業界で既に広く使用されている。腐食試験を考えてみよう。自動車メーカーはロッカーパネルがさびるかどうかを確認するために車両を屋外に10年間置くことはしない。代わりに,塩水路,塩泥路の試験トラックおよび砂利道で,塩化物の高濃度の溶剤と相対湿度の条件を変えて,さびる可能性を加速化している。エンジニアは,1年分の暴露に相当するデータを取得すると,腐食速度の標準的な計算により,長期にわたる耐錆性を予測する。
筆者たちが共同で実施してきた画期的な研究により,同様の技術を自動運転車の試験に応用可能としている。重要なのは,複雑な実世界の運転状況を繰り返し試験またはシミュレーションできる構成要素に分解することである。先行車両の追従走行と合流/割り込みの2つのシナリオを試験した。両ケースとも,試験対象は後続車両である。後続車は先行車両の操縦に応答する。先行車は人が運転する車両の挙動をシミュレーションしている。
試験の課題に加えて,自動運転車のレベルが上がるほど,評価する操作をさらに洗練する必要がある。レベル1およびレベル2の自動運転車では,人間のドライバーが自動化システムで支援されたステアリング,加速,ブレーキ操作をして,実際のモニタリングと運転を担当している。このようなシステムは現に存在しており,システムを評価する方法も実践されている。
しかし,自動化のレベルが高くなるにつれて,ロボットドライバーはより幅広いシナリオに対応する必要がある。レベル4とレベル5の自動化(最も高い自動運転レベル)では,自動化されたシステムが運転と車両の応答を制御する。レベル4車両は,車内の人間のドライバーが確認に対して応答しない場合でも,例えば自動車の往来を前にしての右左折,自転車および歩行者の回避,高速道路への合流,さらにすべての下位レベル運転イベントに対応できなければならない。
次に,各メーカーが自動運転車制御システムの設計,製作,およびプログラミングに対する独自のアプローチを持っていることについて考えたい。メーカーは独自のシステムを保護するために技術的詳細を開示できないため,研究者が試験できるのは,異なるタイプの車両を制御する,本質的に機密のブラックボックスから生じた解析結果のみである。このことは,車両試験の4つの基本的なアプローチに対して大きな課題を提起する。
自然主義的フィールド運転試験(Naturalistic Field Operational Tests):
実世界またはシミュレーション条件での運転で,ドライバーの動作,行動,環境,運転状況に加え,重大なインシデントやニアミス,衝突に関連するその他の要因のデータを生成する。このアプローチの弱点は,多数の車両を必要とし,時間と費用がかかることである。平均的なドライバーはデータが取れるほどの重大な衝突を1回起こすのは38年に1回である。一方で,過去の研究ではフィールド試験プロジェクトで統計的に有意な結果を得るには1,000万ドル以上の費用がかかると算定された。
テストマトリクス:
 Mcityにおける自動緊急ブレーキ機能の実験の様子
Mcityにおける自動緊急ブレーキ機能の実験の様子
各車両を評価する複数の定義済みのシナリオを使用する。例えば,自動緊急ブレーキの試験では,停車している車両に対面するシナリオ,前方の自動車が一定の速度を維持しているシナリオ,さらに前方の自動車がブレーキをかけて速度を落とすシナリオの3種類を使用する。このマトリクスアプローチはフィールド試験およびシミュレーションで使用できる。このアプローチの問題は,すべてのシナリオが定義済みで事前に決定されていることに由来し,試験は自動運転車ではなく主に人間のドライバーからのデータに基づいて設計されていることである。
最悪ケースのシナリオ:
名前が示すように,最も重大な運転シナリオおよびパラメーターが選択される。これは,試験車両の設計における弱点を特定するのに適したアプローチである。ただし,これは実世界の状況におけるリスクや確率を正確に評価するものではない。また,ある車両システムにとっての最悪の状況は別の車両では最悪ではない場合がある。同様に,別の自動運転車にとっては別の最悪ケースの操作が課題となる場合がある。よって,この試験手順は政府の標準化された試験として使用できず,自動運転車の予想安全性能を推測するためや,公正な保険料率を決定するためにも使用できない。ただし,これは自社の自動運転車の最悪ケースの脆弱性を会社が理解し,設計変更につなげるには役に立つアプローチである。
モンテカルロシミュレーション:
最初はマンハッタン計画のために開発されたこのアプローチでは,異なる確率と潜在的な結果を使って何回も計算を繰り返すことで,広範囲の結果のリスクと確率を数学的に評価できる。ただし,実世界の運転データからのシナリオを使用することは,順調な運転の結果が頻繁に評価され,試験の効率が低下する。
これら4種類の評価アプローチのそれぞれに一定の利点があるが,同時に,結果が実世界の運転条件を反映していなかったり,試験のペースを加速化しないなどの欠点もある。その代わりに,潜在的に危険な車両の相互作用を圧縮テストに汲み出して,統計的に道路上で実際に起こっていることを正確に反映する,評価プロセスの加速が必要となる。
長時間にわたる順調な運転データを取り除くことで,自動運転車が脅威に反応する必要がない場合に評価プロセスを高速かつ安価にすることができる。
研究者は,加速化評価プロセスを開発するために以下に示す運転データの6ステップ解析を開始した。
- 実際の運転から大量のデータを収集する。
- このデータから自動運転車と人間が運転する車両との間の有意な相互作用を含む可能性があるイベントのみを抜き出す。
- 確率分布を使用し,人間が運転する車両の挙動を確率変数としての自動運転車の主要な脅威としてモデル化する。
- 日常の運転の安全上重要でない部分を除き,重要なイベント発生の増加に置き換える。
- 加速化シナリオでモンテカルロ試験を実行して,自動運転車と人が運転する車両とのより強い相互作用/衝突を作成する。
- 統計的解析を使用し,加速化試験の結果を数学的に反転させて自動運転車が日常の運転条件でどのように動作するか統計的に確認する。
この解析の運転データは,ミシガン州南東部,およびミシガン州アナーバーのミシガン大学メインキャンパス近くで実施された安全運転モデル展開プログラム(Safety Pilot Model Deployment Program)および車両ベース統合化安全システムプログラム(Integrated Vehicle-Based Safety Systems Program)でミシガン大学交通研究所(University of Michigan Transportation Research Institute)により収集された。安全システムプログラムは,108人のボランティアドライバーが運転する16台の小型車両で構成される6週間のプログラムで,これらの車両から21万3,309マイル,6,164時間の運転データセットが収集された。安全運転モデル展開プログラムでは,2,800台以上の車両が関わり,2012年8月から2014年6月まで,約90万時間で2,500万マイル以上を走行した約400万回の走行データを収集した。
このプログラムに参加した車両は,他のコネクテッドカーや接続されているインフラ要素との運転データの送受信を行う装置を備えていた。
前述した6ステップ解析の後,研究者は自動運転車の試験を急速に加速するミシガン大学の加速化評価プロセスの基盤を形成する4つの方法論を開発した。
1つ目では,有意な運転イベントが道路上で発生する頻度に基づいており,より一般的で順調な安全運転状況を取り除く。2つ目では,重点サンプリングを使用して現実の運転状況を正確に反映する方法で,重要な運転イベント数を統計的に増やす。3つ目では,これら重要なイベントを正確に抜き出す式を作成し,試験し,適用して必要な試験の量をさらに減らす。そして4つ目では,最も複雑なシナリオでの重大な運転イベントのランダムな発生を最適化することを基本に人が運転する車両とロボットカーの間の相互作用を解析する。
この加速化解析研究は,重大な衝突が発生する最も一般的な2種類の状況で実施された。最初の状況は,人が運転する車両の後に自動運転車が追従している場合である。この場合,先行車両の動き,速度,道路および天候条件,その他の急速に変化する要因に合わせて継続的に調整を行う必要がある。もう一方では,自動運転車の前に人が運転する車両が割り込み,人が運転する別の車両が自動運転車に追従している場合である。3つの評価指標(衝突,傷害,および競合のそれぞれの比率)は,自動運転車の1人以上の乗員が中程度から致命的な傷害にさらされる可能性とともに計算された。評価の精度は,加速化シミュレーションと実世界のシミュレーションを実施し,比較することで求めた。
おわりに
4種類の方法論すべてを1つの包括的プロセスに組み合わせることで,ミシガン大学の加速化評価手順が得られた。これにより,衝突,傷害,またはその他の競合イベントの評価に必要な時間を300分の1から10万分の1に短縮できる。最も重大な課題の多い運転状況が凝縮されたこの方法で自動運転車を1,000マイル運転した場合,実世界の30万マイルから1億マイルに相当する結果が得られる可能性がある。
この加速化試験アプローチは,道路上で現在人間が運転している自動車よりも試験対象のロボットカーのほうが90%安全性が高いという信頼度80%を実現するのに十分なデータの収集にかかる費用と時間を最大で99.9%削減できる。この新しい評価プロセスは,自動運転車の信頼性の検証に伴う時間と費用を劇的に減らす可能性がある。
このレベルの信頼度を実現するには,評価者は自動運転車で実世界をさらに何マイルも多く走行する必要がある。これは,レベル4ロボットカーが正確に対応する必要がある実際の運転状況に関するデータ量が現在十分ではないことを意味する。
さらに,研究者は自動運転車で発生する可能性があるあらゆる不具合を解析するために,より重要な運転シナリオを特定する必要がある。これには,雪や霧へのセンサーの暴露,点滅する信号灯,他のドライバーからのジェスチャー,赤信号での車両の走行や信号無視の歩行者など交通規則に違反する動き,過積載の車両などによる通常とは異なる動作や応答,さまざまな道路条件などが含まれる。
最後に,ミシガン大学の研究者は,追従や車線変更に加えて,さらに危険な右左折,横断歩道,対向車両という3つの運転状況に評価を拡大することもめざしている。また,車両単独事故および歩行者や自転車が関係する事故のシナリオを含めることも検討している。
データをそろえ,拡張評価機能を開発して,ミシガン大学の研究者は加速化評価での発見をさらに洗練していく。この革新的な方法論を広範な車両と技術に適用し,自動運転車が安全で信頼できると消費者に示していく所存である。
参考文献など
- 1)
- D. Zhao Accelerated Evaluation of Automated Vehicles, PhD dissertation, The University of Michigan (2016)
- 2)
- LEVELS OF DRIVING AUTOMATION ARE DEFINED IN NEW SAE INTERNATIONAL STANDARD J3016, SAE International (2014)
- 3)
- Federal Automated Vehicles Policy : Accelerating the Next Revolution In Roadway Safety, National Highway Traffic Safety Administration (2016)
- 4)
- M. L. Aust, Improving the Evaluation Process for Active Safety Functions: Addressing Key Challenges in Functional, Formative Evaluation of Advanced Driver Assistance Systems, Chalmers University of Technology (2012)
- 5)
- W. Ma et al.: A Worst-case Evaluation Method for Dynamic Systems, Journal of Dynamic Systems Measurement, and Control, vol. 121, no. 2, p. 191 (1999)
- 6)
- Euro NCAP Test Protocol - AEB Systems, Euro NCAP (2013)
- 7)
- D. Bezzina et al.: Safety Pilot Model Deployment: Test Conductor Team Report, Report No. DOT HS 812 171 (2015)
- 8)
- J. Bucklew : Introduction to Rare Event Simulation, Springer Science + Business Media New York (2004)
- 9)
- D. Zhao et al.: Accelerated Evaluation of Automated Vehicles Safety in Lane-Change Scenarios Based on Importance Sampling Techniques, IEEE Transactions on Intelligent Transportation Systems, Volume: 18, Issue: 3, pp. 595-607 (2017)
- 10)
- D. Zhao et al.: Accelerated Evaluation of Automated Vehicles in Car-Following Maneuvers, arXiv:1607.02687, 2017.2025 (2005)