バリューチェーンを革新するグローバルロジスティクスサービス
近年の購買行動や人口構造などの社会変化に対して,物流業界では従来型オペレーションが限界に近づきつつあり,大きな変革期を迎えている。日立は,顧客事業の価値を高めるための多様なニーズに応える次世代ロジスティクスソリューションの構築に取り組んでいる。






近年物流業界において,eコマース(Electronic Commerce)の拡大などにより少量多頻度配送が増加する一方で,労働力の不足やサービスの高付加価値化などにより,労働集約型オペレーションの収益性が悪化し,社会インフラとしての物流の維持が危機に直面している。これに対して,リソースの共用化やAI(Artificial Intelligence)・ロボット活用による省人化などの新しい取り組みが急速に進められている。
今後,物流の仕組みは,図1のようなロジスティクス向け共通プラットフォームにさまざまなリソースがつながり,荷主からの要求に対してプラットフォームの最適化エンジンが任意のリソースを協調させ,最適なロジスティクスを構築して運用する形態になっていくと考えられる。このとき,品質やスピードなど荷主事業で求められる物流の価値を最大化すべく,多種多様なリソースに対して,能力・状態や,作業の進捗・品質を把握し,E2E(End to End)最適化エンジンが需要とリソースの状況に応じたタスク配分と作業指示を行うことにより,運用を最適化することが可能となってくる。
本稿では,次世代ロジスティクスソリューションの実現に向けて,日立製作所の研究開発グループが開発し,物流に適用している,あるいは今後の適用が期待される5つの技術を紹介する。
図1|次世代ロジスティクスソリューション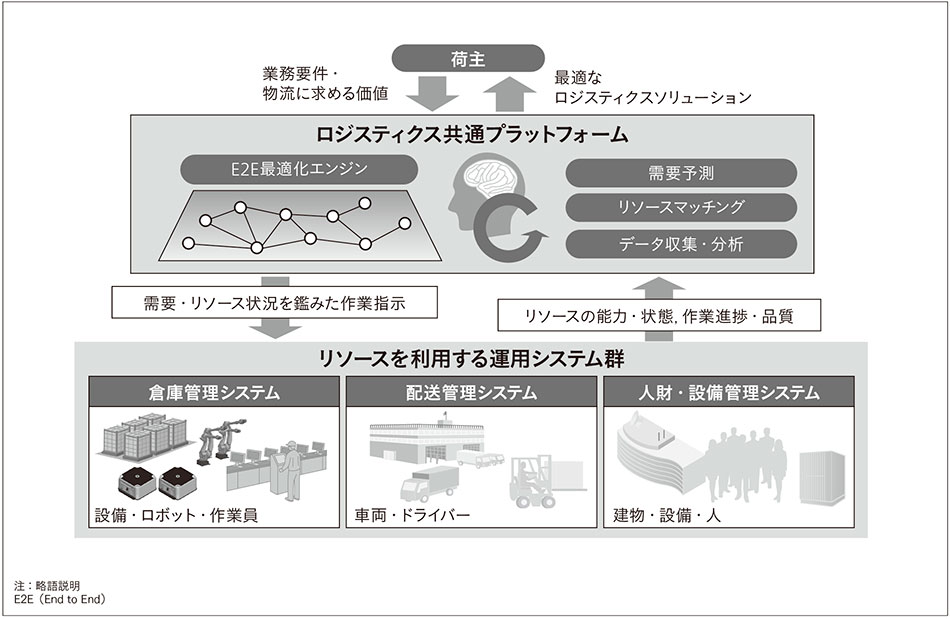 物流に関わるさまざまなデータをロジスティクス共通プラットフォームに収集し,荷主からの要求に対して,利用可能なリソースを組み合わせて適応的にロジスティクスソリューションを構築して提供する。
物流に関わるさまざまなデータをロジスティクス共通プラットフォームに収集し,荷主からの要求に対して,利用可能なリソースを組み合わせて適応的にロジスティクスソリューションを構築して提供する。
顧客の望む場所・時刻に高効率にモノを配送するには,以下の3点が求められる。
日立は,これらの長期・中期・短期レンジの最適な意思決定を支援し,さらには自動化する技術を開発・製品化している(図2参照)。
1.の物流ネットワーク最適化では,FTA(Free Trade Agreement)などにより複雑化する関税や為替,地域ごとに異なる人件費,輸送手段により異なる配達所要時間,倉庫の新設・統廃合コストなどを考慮し,顧客の要求納期を満たす中で,トータルコストが最小となる倉庫配置および輸送手段を数理計画法により自動で導出する技術を開発し,ソリューションを提供している1)。
2.のリソース配置最適化では,消費者の購買行動の変化により難易度が増した在庫管理運用に対して,サプライチェーン上の各倉庫のWMS(Warehouse Management System),ERP(Enterprise Resource Planning)やその上流の生産工場のシステムと連携し,数万SKU(Stock Keeping Unit)・数千拠点から成るE2Eのサプライチェーンが連携した最適在庫オペレーションの自動化ソリューションを開発した。これを実現するために,実際のモノ・キャッシュと,その流れを制御する在庫オペレーションロジックをそのままサイバー空間上に表現し,今後発生する可能性がある需要・供給状況ごとに最適なロジックとそのパラメータの組み合わせをシミュレーション,並列処理,AIによって高速自動学習する技術を開発した。そして,日々の在庫オペレーションとして,学習済みのどの需要・供給状況に近いかをAIが判断し,各拠点のシステムの在庫補充・引き当てロジックを更新し,自動実行する技術を開発した。本ソリューションは,2018年度中の提供開始を予定している。
3.の配送指示最適化では,トラックの積載容量や納品先の荷受可能時間,渋滞情報,一方通行などの交通制約を考慮し,ドライバーの労働時間や運搬コストが最小となる配送ルート・順序を数理計画法によって自動で導出する技術を開発した。さらに,eコマースにより急増している当日配達や再配達の要求や,時々刻々と変化する渋滞状況に対応したリアルタイム最適配送指示技術の開発も進めている。
図2|タイムスパンに応じたロジスティクス最適化のアプローチ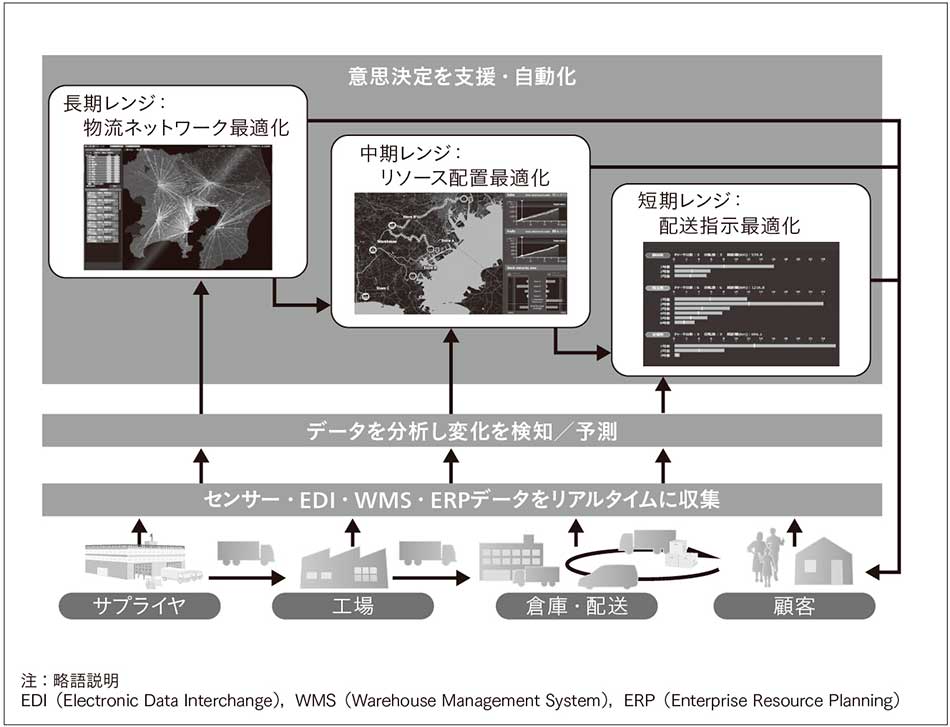 サプライチェーンのデータを集約して活用することにより,長期・中期・短期の意思決定を支援し運用を自動化する技術を開発した。図中の物流ネットワーク最適化および配送指示最適化の事例は株式会社日立物流との共同研究により開発したツールである。
サプライチェーンのデータを集約して活用することにより,長期・中期・短期の意思決定を支援し運用を自動化する技術を開発した。図中の物流ネットワーク最適化および配送指示最適化の事例は株式会社日立物流との共同研究により開発したツールである。
図3|双腕ロボットによる長尺物のピッキング 右腕が箱を下から支え,左腕が箱の側面を吸着することで,双腕を生かして長尺物を取り出している。このような物流倉庫向けピッキング技術を日立物流との共同研究で開発中である。
右腕が箱を下から支え,左腕が箱の側面を吸着することで,双腕を生かして長尺物を取り出している。このような物流倉庫向けピッキング技術を日立物流との共同研究で開発中である。
近年の物流センターでは,コンベアで接続された自動倉庫や,ソータによるケース単位での自動化が行われてきた。一方で,eコマースの発達とともに,商品の1ピース単位での取り扱いが急速に拡大しており,大幅に処理工数が増加している。現在,多くの人手を必要とするこれら1ピース単位の取り扱いを自動化する試みが行われているが,ケースと比較して形状や外観が多様であるため,自動化に必要な物体認識とハンドリングの両面で難しさがある。
認識については,従来のRGB(Red, Green, Blue)カメラに奥行き情報(Depth)を加えることのできるRGBDカメラの利用が進んでいる。RGBDカメラを用いると,ある方向から見た対象物の外観に加えて形状を捉えることができる。それを,システムにあらかじめ登録されている対象物の三次元データと比較することで,所定の商品であるか否かを判定するとともに,その置かれている空間内での相対的な位置を知ることができる。
認識完了後に,上述の三次元データを利用して,ロボットが対象物を把持するコンタクトポイントを算出し,相対位置情報を用いて周辺障害物との接触を回避しながら把持を行うまでの一連の動作を実行する。このコンタクトポイントは,ロボットハンドが吸引タイプであるか,指で挟み込むタイプであるかなどによって変わる。しかし,これはAIの強化学習などの手法により,ロボットがあらかじめ自主的に学習することができるようになってきており,人手によるロボットへの正解情報の教示はいずれ不要になると期待されている。
現在,単体で任意形状の対象物を把持できるようなロボットハンドはないため,複数のハンドを使い分けたり,新たなハンドの開発を待つ必要がある。しかし,2本のアームを持つロボットが左右のアームを協調動作させて人の動きを模擬することにより,多様な対象物に対応することが可能となっており(図3参照),現時点でも多くの場面でロボットを活用することができる。その一例として,システムイノベーションセンタでは,物流センター向けに小型・低床式無人搬送車Racrew2)と協調動作する双腕ピッキングロボットの開発を進めている。
東南アジア各国では,人口増加や経済成長に伴う生活水準の向上により物流量が増加している。中でも,現代的な食料雑貨店やコンビニエンスストアの進出,外食産業の台頭により,冷凍冷蔵食品の物流に注目が集まっている。一方で,交通渋滞や道路インフラの整備不足,低温/定温設備の不足などに起因する配送遅延や積み荷の損傷・品質劣化が課題となっている。
日立アジア社ではこれらの課題解決に向け,輸送環境モニタリング技術と品質影響要因抽出技術の研究開発を進めている。東南アジア各国では,都市部において重度の交通渋滞が定常的に発生しており,配送遅延の原因となるのに加えて,郊外では道路の整備状況が悪いことから車両の振動が製品に損傷を与えている。そのため,積み荷の品質を保持しながら配送リードタイムを短縮することが必要となっている。そこで輸送トラックに付与した各種センサーにより輸送環境に関わる情報を収集し分析する技術を開発した。本技術により,GPS(Global Positioning System)の情報からトラックの位置や速度を推測し,加速度センサーの情報からトラック内の積み荷の状況を推測することができる。そして配送遅延,積み荷の損傷,品質悪化が起こるボトルネック箇所を高精度に予測することで,品質を保持しながら最適なスケジューリング・ルート選択を実現することが可能となる。
実際に輸送トラックにGPSと振動センサーを付与し,輸送環境モニタリングシステムによって道路状況のモニタリングとボトルネック抽出の実証実験を行った(図4参照)。この結果を用いることにより,配送遅延や品質悪化を低減する配送計画を立案することが可能となった。今後は冷凍冷蔵食品を対象に,品質悪化を防止し食料品廃棄量を低減するため,温度管理も含めた輸送環境モニタリングの研究開発を進めていく予定である。
図4|輸送環境モニタリングシステム 輸送トラックに付与した各種センサーから収集したデータを分析して輸送環境のモニタリングを実現し,配送遅延・製品損傷のボトルネックを抽出する。
輸送トラックに付与した各種センサーから収集したデータを分析して輸送環境のモニタリングを実現し,配送遅延・製品損傷のボトルネックを抽出する。
物流センターでは自動化が進む一方で,依然として人間による手作業が残る工程も多く存在している。今後多様なリソース(人・設備)を柔軟に組み合わせて倉庫内作業を最適化するためには,従来アナログで管理されていた作業員の状態や能力を効率的にデジタルデータとして取得する技術が必要と考えられる。この「作業員をセンシング・解析する技術」に関する他分野での関連研究として,(1)作業員にセンサーを装着して詳細な作業を解析する技術と,(2)現場に設置したカメラにより作業員の行動を解析する技術を紹介する。
(1)の例として,作業員にウェアラブルデバイスを装着し,その作業内容をデータ化してAIにより解析し,作業支援やヒューマンエラー防止を行うシステムを産業分野向けに開発している3)。本システムでは,眼鏡型のデバイスであるアイトラッキンググラスを活用した「注視している物体を認識する技術」と,アームバンド型デバイスを活用した「作業者の動作を認識する技術」を組み合わせ,作業内容をリアルタイムに認識する(図5参照)。生産現場で使用される道具・部品や想定される動作を,あらかじめ深層学習によってAIに学習させることで,動作データから作業内容を認識することを実現した。
(2)の技術が搭載されているプラットフォームの例を図6に示す。このフィジカルセキュリティ統合プラットフォームでは,防犯カメラや入退室管理システムなどの各種フィジカルセキュリティシステムのデータやIoT(Internet of Things)の各種センサーデータなどを一元的に収集・蓄積し,AIやアナリティクスソフトウェアにより分析することができる4)。本アナリティクスソフトウェアには,「既設防犯カメラのライブ映像のみでおおよその混雑状態が把握できる技術」,「大量の監視映像から顔や服装,所持品,移動ルートを手がかりとして特定人物を高速検索する技術」,「特定の行動(走る,しゃがむ,ふらつきなど)を映像から検知する技術」などが搭載されている5)。
今後は,物流現場においてこれらの技術を活用することで,業務環境や作業員,モノ(設備,在庫など)の動線・動作・状況を分析し,業務改善や経営課題解決を実現するソリューション開発をめざす。
図5|作業員にセンサーを装着して作業を解析する例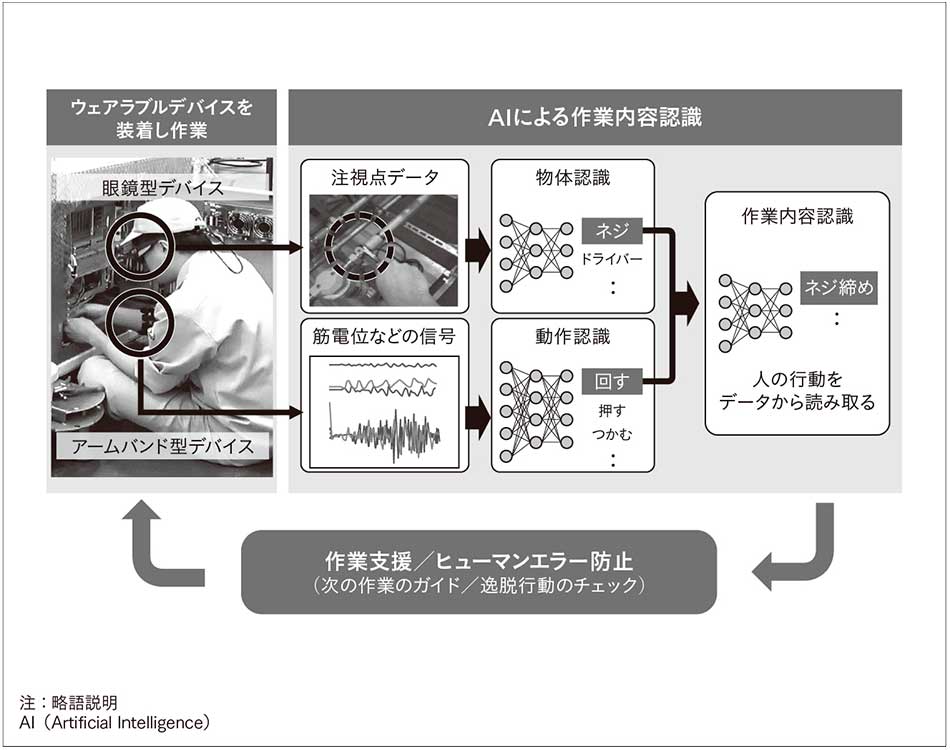 作業員に眼鏡型デバイスとアームバンド型デバイスを装着し,AIにより手作業内容をリアルタイムに認識することで作業支援を実現する。本研究は,ドイツの人工知能研究センター(DFKI:Deutsches Forschungszentrum fur Kunstliche Intelligenz)との共同研究である。
作業員に眼鏡型デバイスとアームバンド型デバイスを装着し,AIにより手作業内容をリアルタイムに認識することで作業支援を実現する。本研究は,ドイツの人工知能研究センター(DFKI:Deutsches Forschungszentrum fur Kunstliche Intelligenz)との共同研究である。
図6|現場に設置したカメラにより作業員の行動を解析する例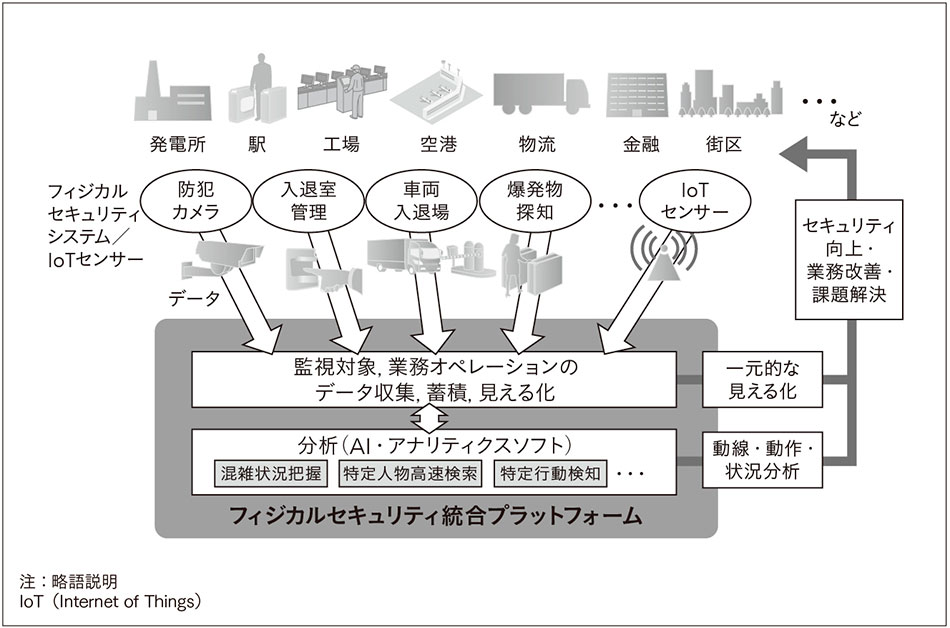 防犯カメラの映像データなどを収集し,分析ソフトウェアにより人や設備などの動線・動作・状況を分析することで,業務改善や経営課題の解決を図る。株式会社日立産業制御ソリューションズ,株式会社日立国際電気ならびに株式会社日立システムズとの共同開発である。
防犯カメラの映像データなどを収集し,分析ソフトウェアにより人や設備などの動線・動作・状況を分析することで,業務改善や経営課題の解決を図る。株式会社日立産業制御ソリューションズ,株式会社日立国際電気ならびに株式会社日立システムズとの共同開発である。
消費者の購買行動の多様化に伴い,事業者が消費者にサービスを提供する際に,それを支える物流に対して求められる価値や実現する手段も多様化している。そこで物流事業者は,消費者およびサービス事業者のニーズと課題を的確に捉え,さまざまな技術やリソースを活用して,サービスの価値向上に寄与するロジスティクスを実現する必要がある。
社会イノベーション協創センタでは,顧客とともに事業機会を探索・発見し,新事業コンセプトを創生してビジネスモデルを検討するための顧客協創方法論「NEXPERIENCE」6)を構築し,物流を含めたさまざまな事業分野に対して活用している。NEXPERIENCEでは,事業創生のプロセスを「事業機会の発見」「現場課題の発見」「経営課題の分析」「サービスアイデアの創出」「ビジネスプロセスの定義」「事業価値のシミュレーション」として定義し,各プロセスに適した手法・ツール群を体系化している。この手法・ツール群を活用することで,協創プロジェクトの立ち上げから事業提案までを強力に推進することができる。NEXPERIENCEに沿って顧客と共に事業アイデアを創生するワークショップでは,さまざまな事業領域の専門家やデザイナー・研究者が参加することで,多角的な視点からイノベーションの創生を促進する。また事業アイデアの実現に向けては,日立が保有する技術の活用を検討することで,サービスの差異化や実現期間短縮を促進する。
物流に関わる取り組みとしては,次世代のモノの買い方・受け取り方を考えるワークショップや,サプライチェーン最適化の事業価値シミュレーションなどの実績がある。社会イノベーション協創センタでは,テクノロジーイノベーションセンタやビジネスユニットと連携しながら,NEXPERIENCEを活用して物流を含むさまざまな事業分野における顧客との新サービス協創を加速していく。
本稿では,次世代のロジスティクスソリューションにおいて活用が期待される研究開発グループの技術を紹介した。
今後物流分野では,革新的なサービスや運用モデルが次々と生まれることが予想される。日立は,あらゆる情報を収集し活用する技術を開発することにより,社会の変化に柔軟に対応し,ロジスティクスの価値を最大化するソリューションの実現に貢献していく。
