計測技術を活用したソリューション
近年の物流量の増加や人手不足に伴い,製造業や流通業などを中心に倉庫などでの搬送作業の自動化が進展しつつある。そこで用いられる無人搬送車の多くは,現場に設置された磁気テープやマーカなどのガイドを位置同定のために必要とするが,その設置コストやメンテナンスの手間などが無人搬送車の導入の妨げとなっている。
以上を踏まえ,日立はレーザースキャナより得られる環境の幾何形状のデータと環境の地図とのマッチングにより位置同定を行うコンポーネント製品ICHIDASを開発した。このコンポーネントの無人搬送車への組み込みにより,無人搬送車のガイドレス化が可能となる。本稿では,このコンポーネントの機能や適用事例について述べる。


近年の物流量の増加や人手不足に伴い,製造業や流通業において,倉庫などでの搬送作業の自動化が期待されている。これらの搬送作業の自動化には,磁気テープなどのガイドを用いる方式の無人搬送車が従来から用いられてきた。これらの無人搬送車は,床面に貼られた磁気テープや現場に設置されたマーカなどを計測することで,位置と姿勢を求め(以下,「位置同定」と記す。),走行制御を行う方式を採っている。しかし,この方式には,(1)導入時や設備レイアウト変更時に設置工事が必要であること,(2)剥がれた磁気テープの修繕などのメンテナンスが必要となることなど,現場の操業に影響を及ぼしうる課題があり,無人搬送車の現場への導入の妨げとなっている。
これに対し,ガイドを用いない(以下,「ガイドレス」と記す。)方式として,レーザースキャナによる計測で得られる環境の幾何形状のデータと,環境の幾何形状を記した地図とのマッチングに基づいて位置同定を行う方式がロボットの学術分野を中心に提案されてきた1)。この方式のアルゴリズム部分については,OSS(Open Source Software)のライブラリとして提供されている例なども見られるが,これらを無人搬送車メーカーなどが自社製品に利用する際には,運用に向けた機能の評価・拡充やライセンスの確認などが想定され,製品への適用が容易でないことも多い。
以上を踏まえ,ガイドレスでの位置同定機能を無人搬送車メーカーが自社製品に容易に組み込める部品として提供することを目的に,位置同定機能とこれに必要な地図作成などの運用向け機能をまとめたコンポーネント製品ICHIDASを開発した2)。
表1|ICHIDAS(ICHIDAS2-AX)の仕様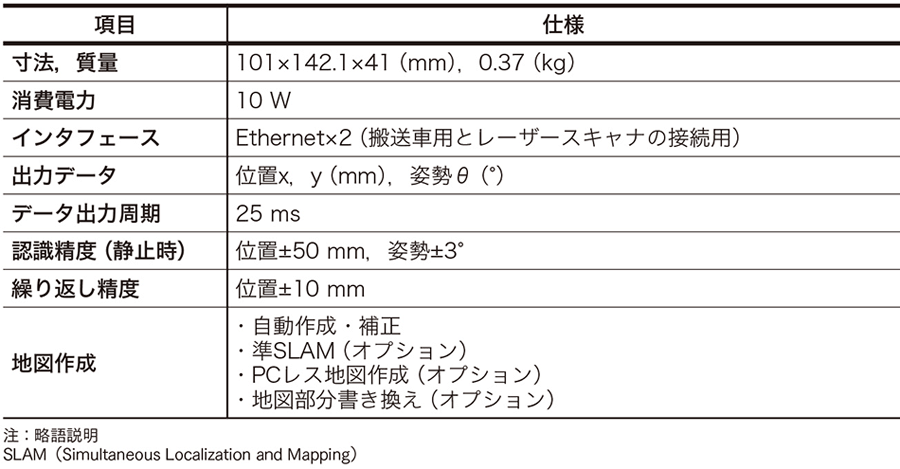 ICHIDASは,レーザースキャナや地図作成機能が運用に応じて選択できるようになっており,無人搬送車に広く適用できる。
ICHIDASは,レーザースキャナや地図作成機能が運用に応じて選択できるようになっており,無人搬送車に広く適用できる。
図1|ICHIDAS利用時の無人搬送車の構成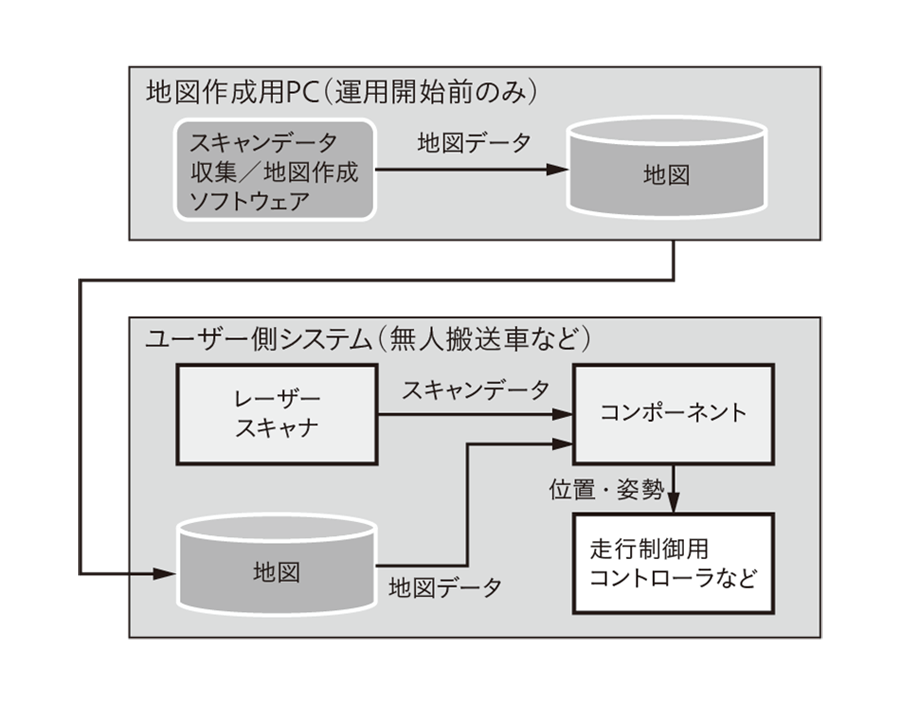 導入時には,無人搬送車などで環境の計測を行い,収集したデータを基に,地図作成を行う。作成した地図を用いることで位置同定が可能となる。
導入時には,無人搬送車などで環境の計測を行い,収集したデータを基に,地図作成を行う。作成した地図を用いることで位置同定が可能となる。
ICHIDASは,無人搬送車のガイドレス化を目的として,レーザースキャナを用いた位置同定機能などを部品化したものである。ICHIDASの主な仕様を表1に,無人搬送車に適用した際の構成を図1に示す。ICHIDASは,位置同定処理そのものを担うコンポーネント本体と地図作成ソフトウェアなどから構成される。このうち,コンポーネントは小型の産業用コンピュータであり,レーザースキャナと共に無人搬送車の走行制御用コントローラに有線LAN(Local Area Network)で接続して用いる。なお,ここでのレーザースキャナとは,レーザーが物体に反射してセンサーに戻ってくるまでの時間を基に,レーザーを照射した方向ごとの物体までの距離を計測することで,環境の幾何形状を表す点群のデータ(以下,「スキャンデータ」と記す。)が得られるようなセンサーのことをいう。
コンポーネントでは,このスキャンデータと環境の地図とのマッチングに基づく位置同定が,レーザースキャナの計測周期ごとに行われ,得られた位置同定結果が無人搬送車の走行制御用コントローラに送信される。無人搬送車側では,この受信した位置同定結果を基にした経路計画や経路に沿った走行制御が可能となる。
以上のように,コンポーネントとして無人搬送車に位置同定機能を組み込み可能とすることで,ガイドレス化への対応のほか,無人搬送車の走行制御用コントローラの処理負荷の軽減,無人搬送車メーカーによる走行制御用コントローラとコンポーネントを切り分けた開発への対応を図っている。
また,位置同定については,無人搬送車のオドメトリを用いる手法も提案されているが,オドメトリの利用を前提とすると適用可能な無人搬送車が限られてくることなどから,レーザースキャナのみで位置同定を行う方式とした。なお,ここで述べたコンポーネントでの位置同定処理には,環境の地図の準備が必要となるが,これには地図作成ソフトウェアを用いる。これは,環境を計測して得られたスキャンデータを基に環境の地図の自動作成を行うものとなっている。
次節では,位置同定と地図作成の各機能とその特長について述べる。
位置同定はスキャンデータと環境地図のマッチングによって行われる。ここでのマッチングとは,スキャンデータを成す点群を,環境の幾何形状を画像状に表現した地図に重ね合わせた際に,幾何的特徴が重なる割合が大きくなるような位置・姿勢を地図上で探索する処理に相当する。
このマッチングに基づく位置同定について,無人搬送車での利用を想定した場合,環境変化に対する頑健性と,レーザースキャナの計測周期に対応した処理の高速性が特に求められる。
まず,環境変化に対する頑健性についてであるが,ここでは,現場環境の設備の配置などが多少変更され,実際の環境と地図との間に差異が生じた場合においても,位置同定精度の低下を抑えることを指す。無人搬送車を運用する環境では,かご台車の仮置きなどによって,環境と地図との間に差異がしばしば生じることから必要な対策となる。
この環境変化による位置同定誤りは,レーザースキャナに近い範囲の環境変化によって特に生じやすくなる。これは,回転するセンサーヘッドにより各方向にレーザーを照射して計測を行うレーザースキャナの構造上,レーザースキャナに近い計測点群の密度が高くなり,マッチングに際しては,この密度が高くなった点群がレーザースキャナに近い範囲の格子に合わせ込まれてしまうことによる(図2参照)。
これを踏まえ,スキャンデータのうち,レーザースキャナに近い範囲の点群については,点群を間引いて密度を下げることで,レーザースキャナから遠い点群と地図との重なり合わせがなされるようにしてマッチング誤りの低減を図っている。また地図の格子が大きい場合,すなわち,地図の解像度が低いときほど,ある格子に点群が集中してマッチング誤りを引き起こしやすいことから,地図の解像度が低い場合ほど点群が間引かれるようになっている。
次に,処理の高速性についてであるが,これについては無人搬送車に用いられるレーザースキャナの計測周期に間に合うように位置同定処理の高速化を図るものとした。
具体的には,この高速化はCoarse to Fineの処理の枠組みに沿うものとした。これは,特に画像処理分野で行われる手法で,まず低解像度の画像上でマッチングを行い,そこでのマッチング結果の周辺のみの高解像度の画像上でさらなるマッチングを行うようにすることで,探索範囲を絞り込み,処理の高速化を図る手法である。ここでは,位置同定のマッチングに用いる地図について,低解像度の地図と高解像度の地図をあらかじめ作成しておき,低解像度の地図上で大まかにマッチングを行ったうえで,高解像度の地図上で詳細なマッチングを行っている。なお,このような低解像度の地図でのマッチングでは,地図の低解像度化に伴う幾何的特徴の消失によってマッチング誤りが生じやすくなる。このため,低解像度の地図を作成する際に,エッジなどの幾何的特徴を残すような画像処理を行うことで,マッチング誤りの低減を図っている。
図2|スキャンデータと地図のマッチングによる位置同定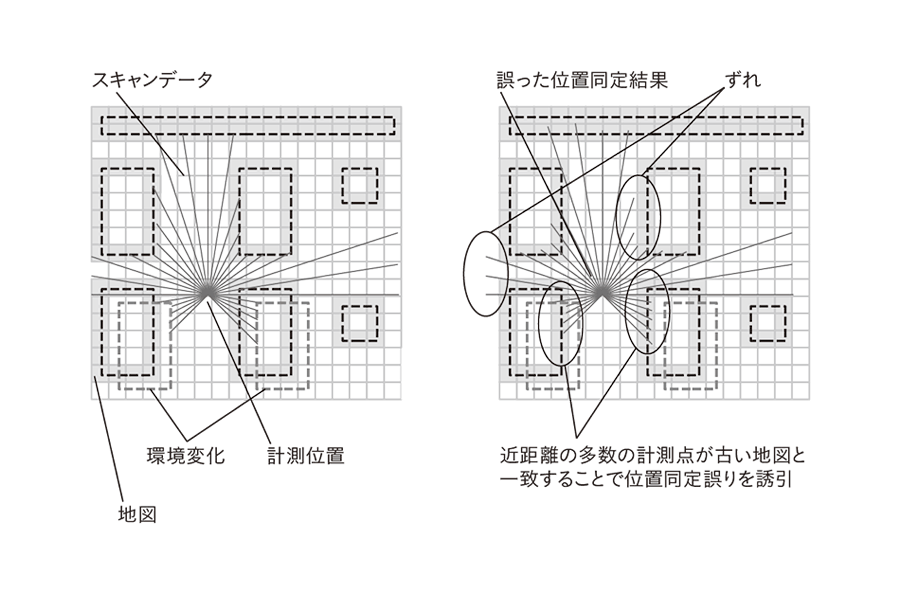 スキャンデータと地図とが重なる割合が大きくなるようにマッチングを行う。計測位置に近い範囲の実環境と地図に差異が生じる(左図)とマッチングにずれが生じうる(右図)。ICHIDASでは,スキャンデータを成す計測点群の密度の調整により,このずれの低減を図っている。
スキャンデータと地図とが重なる割合が大きくなるようにマッチングを行う。計測位置に近い範囲の実環境と地図に差異が生じる(左図)とマッチングにずれが生じうる(右図)。ICHIDASでは,スキャンデータを成す計測点群の密度の調整により,このずれの低減を図っている。
位置同定は,スキャンデータと環境の地図のマッチングによって行われるが,この地図には,占有格子による地図を用いる。ここでの占有格子とは,空間を分割して設けた格子を指し,格子ごとに環境中の物体の存在確率を記録することで環境内の壁面や設備などの幾何形状を表すために用いられる。ここでは環境の地図をビットマップ画像で表現するものとし,その画素値に,環境をスキャンした際のレーザーの反射の有無に基づいた物体の存在確率を記録し,地図として用いるものとする。
この地図は位置同定の開始前に作られている必要があり,環境の計測と,地図作成ソフトウェアによる地図の自動作成の各手順を経て作られる。
まず環境の計測については,レーザースキャナが搭載された無人搬送車をユーザーがリモコンで走行させるなどしながら,環境のスキャンデータとして収集する作業に相当する。
また,地図の自動作成については,収集されたスキャンデータを基に(1)センサーの移動量の推定と,(2)推定したセンサーの移動量に基づいたスキャンデータの地図へのマッピングの各処理の逐次繰り返しによって行われる。
このうち,(1)の移動量の推定は,前述の位置同定と同様の処理を基に行われる。位置同定では,地図に対してスキャンデータのマッチングが行われるが,(1)の移動量の推定の際には,最初の1フレーム分のスキャンデータをマッピングした地図に対して,次のフレームのスキャンデータのマッチングが行われる。これによって,既存のスキャンデータマッチングを行うことで,そのスキャンデータ上での位置・姿勢が得られる。続いて,(2)の処理として,(1)で得られた位置・姿勢にスキャンデータの座標変換を行い,スキャンデータを成す点群をビットマップ画像に記録(マッピング)する。
以上の一連の処理を繰り返していくことで,スキャンデータはビットマップ画像上に統合され,環境の地図が自動的に作成される。
実際の運用に際しては,まず導入時に環境の計測を行い,基準となる地図を作成し,これを用いて無人搬送車の運用を行う。しかし,運用開始後,パレット置き場など運用中の環境変化が著しい場所においては,環境と地図との不一致が生じ,位置同定に影響を与えうる。このため,地図上で環境変化が特に生じる範囲をあらかじめ指定しておくものとし,無人搬送車が走行した際に,基準となる地図との差異が検出された場合は,その差異を地図にオンラインで反映することで位置同定誤りの予防を図っている。
図3|物流支援ロボットLapi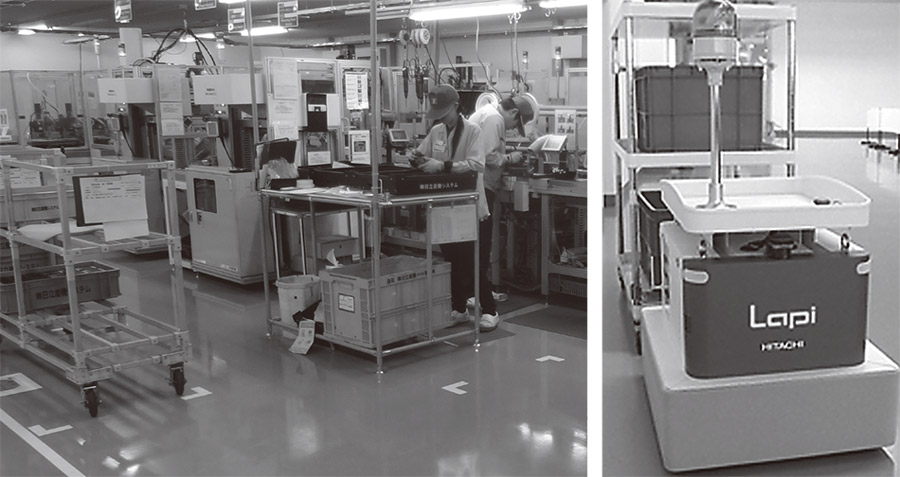 Lapiを運用する工場内の様子(左)とLapiの外観(右)を示す。LapiはICHIDASによりガイドレス対応となっている。
Lapiを運用する工場内の様子(左)とLapiの外観(右)を示す。LapiはICHIDASによりガイドレス対応となっている。
物流支援ロボットLapiに適用し,工場内における物品搬送を自動化した事例について紹介する(図3参照)。
Lapiは,差動二輪による移動機構,レーザースキャナとICHIDASなどを備えている。また,工場など人と共存する場所では,かご台車などが使われていることも多いが,これらの台車間で荷物の積み替えなしで搬送を行いたいとする現場のニーズが大きいことなどを踏まえ,Lapiは多種多様な台車の牽(けん)引,空台車置き場での台車検出と自動接続などに対応している。
図4に,Lapiを導入した工場の地図を示す。この地図は横幅110 m程度の現場に対応している。まずLapiの導入時に,リモコンにてLapiを走行させながら現場環境のスキャンデータを収集し,その後地図作成ソフトウェアにより地図の自動作成を行った。この地図を用い,現場にて,Lapiによる無人搬送を行った。ガイドレス対応によりスムーズに現場に導入できること,また,仮置きの台車や人の横切りなど,実環境と地図との差異が生じる状況でも工場内での物品搬送が可能なことが確認できた。
図4|作成した地図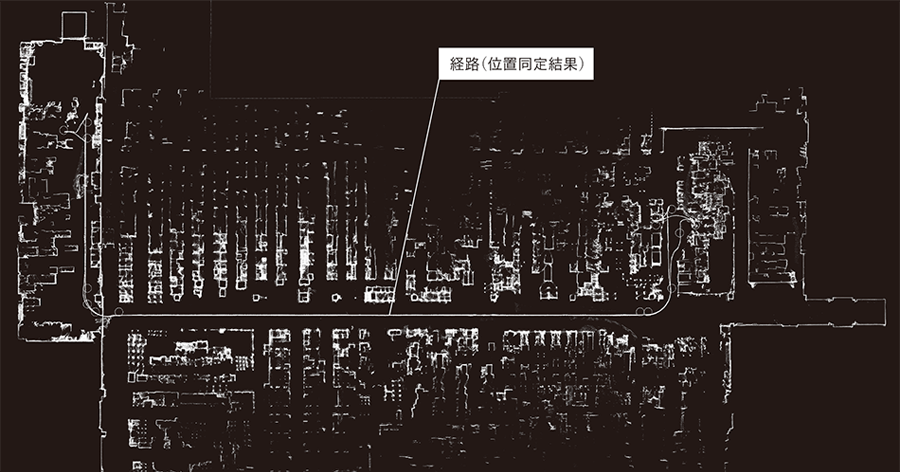 横幅110 m程度の工場内の地図をICHIDASのソフトウェアを用いて自動作成した例を示す。設備のレイアウトを含めて詳細に表現されている。
横幅110 m程度の工場内の地図をICHIDASのソフトウェアを用いて自動作成した例を示す。設備のレイアウトを含めて詳細に表現されている。
ここでは無人搬送車向け位置同定コンポーネントICHIDASについて,スキャンデータと地図とのマッチングによる位置同定機能やこれを用いたガイドレス化について述べた。
ガイドレス化により,磁気テープなどのガイドの設置工事が不要となるなど,無人搬送車の適用範囲の拡大につながると思われる。今後も,無人搬送車の運用に合わせた機能の拡充を進めていく。
