
安全・安心とともにQoL向上を提供するセンシング・車両制御技術
執筆者
照井 孝一Terui Koichi
- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
志磨 健Shima Takeshi
- 日立オートモティブシステムズ株式会社 AD/ADASビジネスユニットシステム設計本部 センシングシステム設計部 所属
豊田 英弘Toyoda Hidehiro
- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
上野 健太郎Ueno Kentaro
- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
執筆者の詳細を見る
照井 孝一Terui Koichi

- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
- 現在,自動運転/先進運転支援システムの開発に従事
志磨 健Shima Takeshi

- 日立オートモティブシステムズ株式会社 AD/ADASビジネスユニットシステム設計本部 センシングシステム設計部 所属
- 現在,車載カメラ(ステレオカメラ)の開発に従事
豊田 英弘Toyoda Hidehiro

- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
- 現在,自動運転技術を適用したアプリケーション開発に従事
- 博士(工学)
- 情報処理学会会員
- 電子情報通信学会会員
上野 健太郎Ueno Kentaro

- 日立オートモティブシステムズ株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
- 現在,車両運動制御技術の開発に従事
ハイライト
日立の自動運転/先進運転支援システムは,車載機器と情報インフラが連携したSense-Think-Actの三要素から構成され,高齢者や運転初心者でも安全・安心かつ快適に運転できるなどクルマを通じたQoL向上に寄与する機能の提供をめざしている。
本稿では,複雑な交通環境下で遭遇するさまざまな危険を検知する次世代ステレオカメラ(Sense)と,センシング結果を基に周辺物体との衝突を予測回避するリスク予測マップ技術(Think)について紹介する。また,シャシー/パワートレインを操作し,ドライバーが安全・安心で快適な乗り心地を享受することを可能とする車両制御技術(Act)に関して紹介する。
1. はじめに
事故ゼロをめざした自動運転/先進運転支援システムの開発が新興国を含む世界規模で進められている。開発技術は,初心者や運転に自信のないドライバー,さらには運動能力に不安を抱える高齢者の安全・安心で快適な移動の実現に大きく貢献し,クルマを通じたQoL(Quality of Life)向上に寄与することができる。また,新型コロナウイルスの影響から,個人消費による物流負担が増大し,自動車の使用目的が「ヒト」から「モノ」の移動支援へと広がっている。その結果,モノの移動の効率化を実現するラストワンマイル技術にも注目が集まっている。これらの社会のニーズに応えるためには,自動車が周囲環境を検知し,安全かつ効率的な移動を実現するSense-Think-Actの三要素を高度に統合しなければならない。QoL向上の観点では,開発技術を高速道のみならず一般道も対象として適用・稼働エリアを拡大し,安全・安心で快適なクルマをより多くの運転シーンで機能させることにより,誰もが自立し不自由なく移動できる世界の実現に貢献するものと考える。
本稿では,自動運転/先進運転支援システムの構成,一般道向けに拡張されたセンシング技術,および「ヒト」と「モノ」の安全・安心で快適な移動を実現する車両制御技術について紹介する。
2. 自動運転/先進運転支援システム
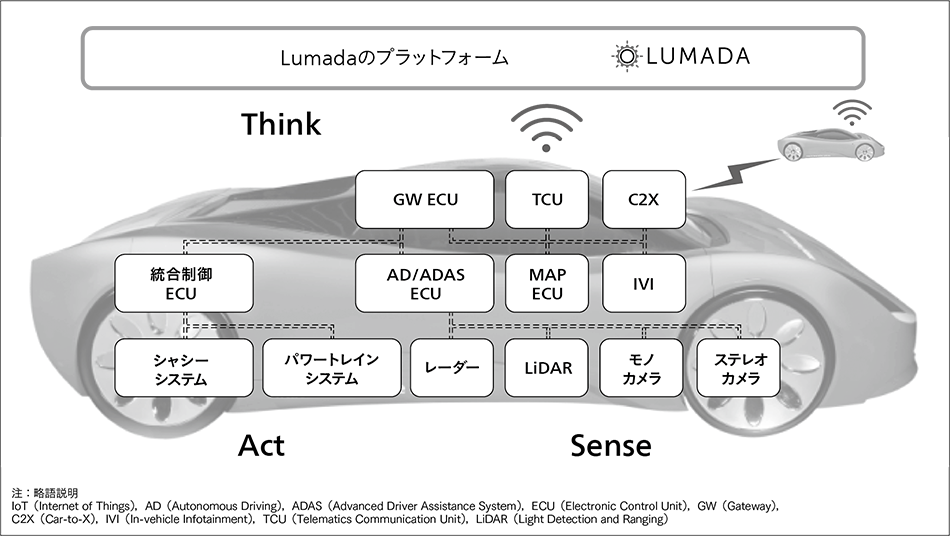
図1|自動運転/先進運転支援システムの構成 車両に搭載された各種センサーとECUの一連の動作により,自動運転および先進運転支援システムが実現される。
日本では急速に高齢化が進み,世論調査による運転に関する状況では,多くの高齢者が日常生活で自動車を移動手段として使用し,自ら運転を行っている1)。しかし,高齢者は加齢により動体視力や瞬時に判断する力が低下するなどの身体機能の変化により,ハンドルやブレーキ操作に遅れが出ることがあるなどの傾向が見られ,運転に不安を抱えながらも運転を続けていることも多い。また,このような状況は初心者や運転技術に自信のないドライバーにも該当する。
これらの状況を解決することが期待される技術として,先進運転支援システムおよび自動運転技術の開発が進んでいる。
図1に自動運転/先進運転支援システムを実現する構成を示す。
自動運転/先進運転支援システムを搭載した車両には,カメラ,レーダーなど複数のセンサーが搭載されている。安全・安心な運転を行うためには自車周囲環境をリアルタイムに360度検知する必要があり(Sense),AD(Autonomous Driving)/ADAS(Advanced Driver Assistance System)ECU(Electronic Control Unit)では,各センサーから送られた情報を統合し,自車周囲のすべての物体(他車両,ヒト,信号機などの地物)と物体の将来位置を予測して衝突などの危険を認知する。そして,MAP ECUに保存されている高精度地図を活用し,自車が安全に走行する軌道と速度を計算し,統合制御ECUに制御指示を行う(Think)。
統合制御ECUでは,自車両の状況と制御指示に基づき,安全・安心で乗り心地の良い車両制御を実現すべく,ステアリングやブレーキなどのシャシーシステムやエンジンなどのパワートレインシステムの制御を行う(Act)。また,周辺監視で得られた物体と物体の将来位置,軌道や速度はLumadaのプラットフォームに送信されてドライバー経験情報として蓄積・解析され,再び複数の車両宛てに配信し,車両間で共有される。
このように情報インフラを含んだ日立の自動運転/先進運転支援システムは,Sense-Think-Actサイクルにより,熟練ドライバー並みのノウハウをデジタル化,蓄積することで初心者でも安全・安心かつ快適に運転することができ,誰もが自立して不自由なく移動できる世界の実現に貢献することができる。
次章以降では,物体を高度に検知可能なステレオカメラ(Sense),物体との衝突を予測回避するリスク予測マップ(Think)および安全・安心で乗り心地の良い車両制御技術(Act)に関して紹介する。
3. QoLの向上に寄与する一般道対応運転支援
3.1 一般道対応運転支援へのニーズ
従来の運転支援システムでは高速道での速度維持・車線維持走行などが想定されていたが,QoL向上のためには,高速道のみならず一般道も対象とした運転支援が有効である。しかし,一般道の自車周囲環境は,高速道よりも多種多様な交通参加者が存在し,複雑な道路構造や順守すべき交通法規も増えるため,状況把握がより一層困難になる。このように複雑な環境を正確に検知するためには,任意の立体物検知と広域・遠方を両立する三次元センシングが必要となる。
本章では,複雑な交通環境下で遭遇するさまざまな危険を検知する次世代ステレオカメラと,検知結果を基に物体との衝突を予測回避するリスク予測マップ技術について紹介する。
3.2 一般道対応運転支援を実現するステレオカメラ技術
日立では,二つのカメラで三次元情報と画像情報を同時に取得するステレオカメラを2008年より運転支援向け外界検知センサーとして提供している。図2に示すように,ステレオカメラは人間の目と同じように,左右二つのカメラの見え方のずれ(視差)から対象物までの距離を算出する。この視差は,画像の一点一点に距離の情報を持つ視差画像(距離画像)として扱い,視差画像の中からある大きさの塊を立体物として検出し,最後に検出した物体が何であるかを識別する。日立のステレオカメラの特長は,未知の形状や未知の模様の物体でも検知できることと,物体全体が見えていなくても検知と測距ができることである。そのため,特に複雑環境での物体検知に優れている。
2018年より量産中のステレオカメラは,運転支援機能のアセスメントであるNCAP(New Car Assessment Programme)のうち,自車直進時に飛び出し歩行者が検知可能な水平画角と,先行車追従機能に必要な遠方車両検知をオールインワンで実現していることが特長である。
一般道での運転支援では今後,交差点での事故防止が重要であり,NCAPにも順次導入される。現在,日立では,交差点右左折時の歩行者や自転車への衝突防止に必要な広い水平画角と,先行車追従機能に必要な遠方車両検知を両立する次世代ステレオカメラを開発中である2)。
図3に示すように,左右のカメラで検知する画像範囲を左右にずらす方式を採用することで,センシングの画素数を大幅に増やすことなく,従来比約3倍の広角化を実現した。本方式では,左右カメラが重複し,視差で物体検知する領域を広げるとともに,左右カメラが重複しない領域では,時系列画像処理で立体視する手法と,中央部の視差を利用した立体物検知とをシームレスにつなぐことで,画角全体で高精度に歩行者や自転車を検知し測距することが可能となった3)。
図2|ステレオカメラの計測原理 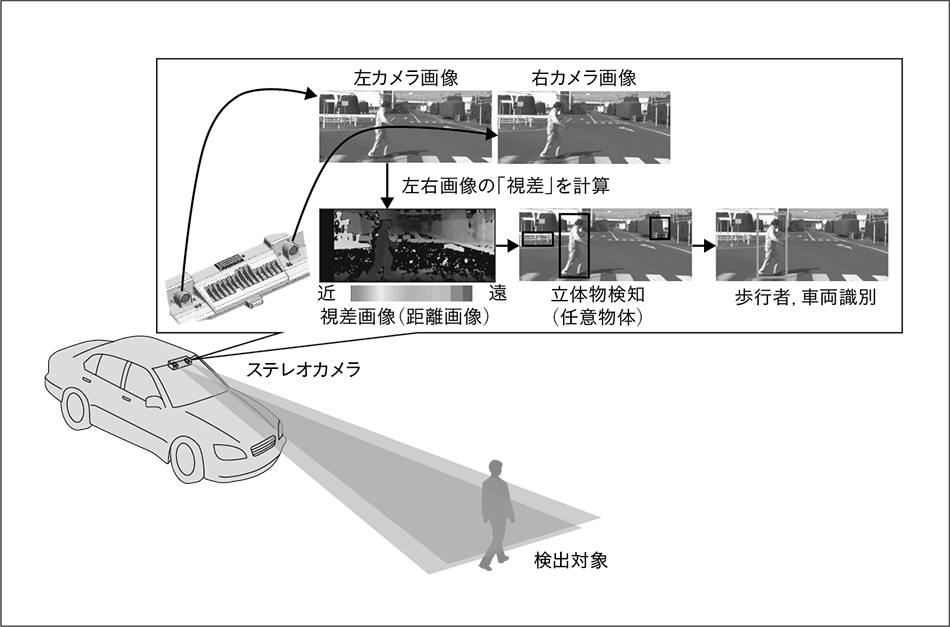 左右の二つのカメラの見え方のずれである「視差」から視差画像を生成し,視差画像から任意形状の立体物を検知する。
左右の二つのカメラの見え方のずれである「視差」から視差画像を生成し,視差画像から任意形状の立体物を検知する。
図3|次世代ステレオカメラ 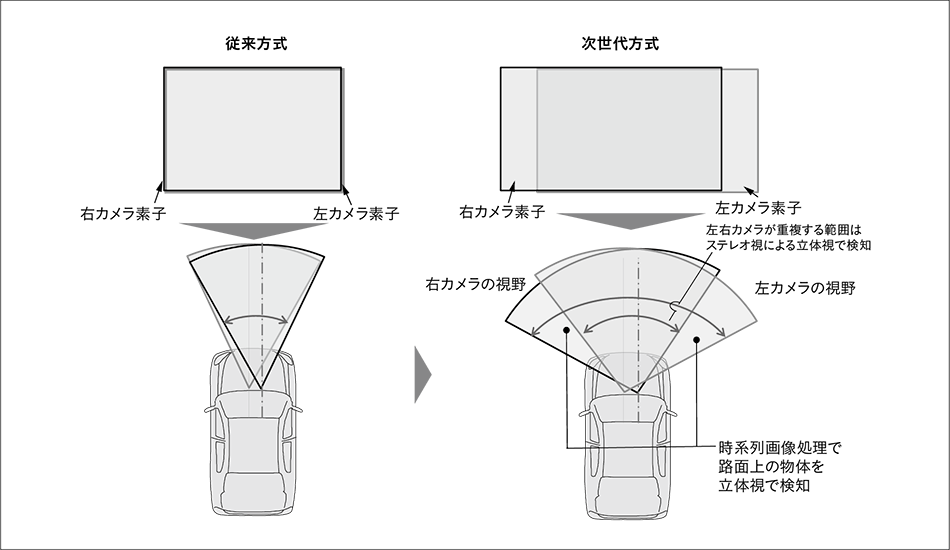 従来方式は左右のカメラのセンシング素子による検知範囲は同じであったが(左図),次世代方式は,視差で物体検知する画角を従来より広げるとともに,左右のカメラのセンシング素子による検知範囲を左右にずらし,全体の検知範囲を広げた(右図)。
従来方式は左右のカメラのセンシング素子による検知範囲は同じであったが(左図),次世代方式は,視差で物体検知する画角を従来より広げるとともに,左右のカメラのセンシング素子による検知範囲を左右にずらし,全体の検知範囲を広げた(右図)。
3.3 一般道での衝突を回避するリスク予測マップ技術
図4|リスク予測マップの生成 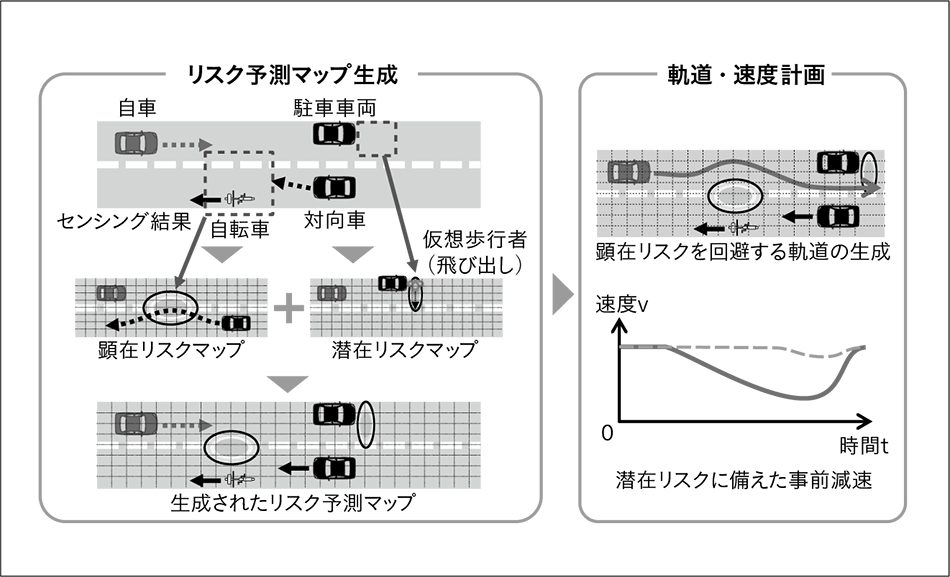 センシング結果を基に路上立体物との衝突を予測し,顕在リスクと潜在リスクを二次元マップとして表現する。高リスクの領域を回避する軌道を生成し,潜在リスクに備えた速度を求めることで,障害回避軌道を得る。
センシング結果を基に路上立体物との衝突を予測し,顕在リスクと潜在リスクを二次元マップとして表現する。高リスクの領域を回避する軌道を生成し,潜在リスクに備えた速度を求めることで,障害回避軌道を得る。
前節のステレオカメラも含め,車載センサーによるセンシングは現在の周辺状況を検知するものであり,見えている危険の回避が可能となる。しかし,一般道などの複雑な運転環境下では,検知できない領域にある危険を予測した運転が必要となる。例えば,熟練ドライバーは無意識にも,物陰から歩行者が飛び出してくるかもしれないと予測しながら運転することで,事前に危険を回避している。運転支援システムでも,検知結果から数秒先の衝突リスクを予測して事前に回避行動をとることで,多くのドライバーの不安を払拭し,安全・安心を提供することが可能である。
本技術のリスク予測マップは,自車が将来,到達する地点での衝突リスクを予測し,それを全行動範囲において計算した結果を一つの二次元マップ上に表現したものである(図4参照)。衝突リスクは,センサーで検知した静止物体や移動物体との衝突(顕在リスク)だけでなく,センサーでは検知できない領域(死角)に潜むリスク(潜在リスク)も考慮した。顕在リスクとしては,移動物体の将来の移動経路を予測し,その経路と自車の将来位置とが重なるポイントを高リスクの領域と判定する。潜在リスクとしては,自車と検知物体との位置関係で生じる死角領域を求め,あらかじめ定義した危険モデル(図4では駐車車両の陰からの歩行者飛び出しを想定)が当てはまる際には潜在リスク領域と判定する。これらのさまざまなリスクを多重化したリスク予測マップを用い,高リスク領域を回避して低リスク領域をたどる軌道探索を行えば,将来を見通したリスク回避軌道が得られる。さらには,歩行者飛び出しなどの潜在リスクには,手前であらかじめ減速しておくなどの速度計画を行うことで,事前のリスク回避が可能となる。
本技術の原理検証では,5秒先までのリスク予測をリアルタイムに行うことで,潜在リスク回避を行う自動運転を実現できる見通しが得られた。
4. QoLの向上に寄与する車両制御
4.1 安全・安心と快適を実現する車両制御技術
図5|軌道計算アルゴリズムと軌道をトレースする高精度車両制御  QoLを高めるモビリティは,軌道計算アルゴリズムと高精度車両制御,さらにその運動を実現するためのさまざまなアクチュエータで実現される。
QoLを高めるモビリティは,軌道計算アルゴリズムと高精度車両制御,さらにその運動を実現するためのさまざまなアクチュエータで実現される。
自動運転では,ある地点から別の地点に運転操作なしに移動するだけではなく,安全・安心で快適に,また短時間での移動を実現することが,ユーザーのQoLを向上させるうえで重要である。例えば,熟練ドライバーは曲がりくねった山道などでも乗員に不快感を与えないで運転することができる。自動運転や運転支援ではQoLを高める車両制御として,次の三つを満たす走行をECUで実現する必要がある。
- 未知の状況やリスクを,余裕を持って避ける(安全・安心)。
- 曲がりくねった道でも体が前後,左右に振られない(快適)。
- 法規や周囲環境が許す範囲でできるだけ高い車速を維持する(時短)。
これらの実現には,乗り心地の良い軌道(経路,車速を含む)の計算アルゴリズムと,軌道を正確にトレースする車両制御,さらに車両制御を実現するためのさまざまなアクチュエータが必要である。日立では,前述の軌道計算アルゴリズムDynamics planning,軌道をトレースする高精度車両制御HPVC(High Precision Vehicle Control)を開発している(図5参照)。
4.2 軌道計算アルゴリズムと軌道をトレースする高精度車両制御
Dynamics planningは,前方の走行可能領域の情報やリスク予測マップから,乗員にかかる加速度や加速度の変化を考慮し,最も安全・安心で快適な走行軌道を計算する技術である。前方の走行可能領域に対して取りうる経路と車速の組み合わせは無限に存在するが,Dynamics planningでは,道幅を使い,なるべくゆったりした,乗り心地の良い軌道を計算する。また通常は,急なカーブに対しても十分に手前で減速して曲がることのできる軌道を計算するが,急なリスク変化や曲がり切れない急カーブがある場合には安全に回避する軌道を計算する。
一方,HPVCは,従来の運転支援制御ではトレースが難しい小さなカーブや,急な操舵が必要な軌道を正確にトレースして車両を走行させる技術である。従来はアクチュエータや車両の遅れによる精度や安定性の低下を避けるため,自車両の少し前方を目標とした車両制御を行っていた。そのため,細かな軌道はトレースできずショートカットしてしまう問題があった。HPVCでは,ECU内で車両運動の予測シミュレーションを行うことで遅れによる問題を解決するとともに,自車両の近傍点を目標とした制御を可能とし,細かな軌道を正確にトレースした走行を実現している。
Dynamics planningとHPVCは,安全・安心で快適なモビリティを実現する車両制御技術であり,QoLの向上に大きく貢献することができる。
5. おわりに
自動運転/先進運転支援システムと,これらを実現するセンサーおよび車両制御技術の取り組みについて述べてきた。
本稿で紹介した技術は,車内のみならず,車外の情報インフラ(Lumadaのプラットフォーム)を含んだSense-Think-Actサイクルにより,初心者や高齢者が安全・安心に運転することができ,誰もが自立し不自由なく移動できる世界の実現に貢献するものである。今後も日立グループの幅広く,多様な技術を統合・融合し,自動車メーカーと連携しながらクルマの観点でさらなるQoLの向上を実現していく。
参考文献など
- 1)
- 内閣府,令和元年交通安全白書,第2章人・車両・道路各々の側面から見た交通安全,第1節「人」と社会をめぐる変化(2019.7)
- 2)
- 日立ニュースリリース,遠方検知と交差点での衝突被害軽減ブレーキが可能となる広い画角を両立させるステレオカメラを開発(2019.12)
- 3)
- M. Kobayashi et al. :Wide Angle Multi-Shift Stereo Camera with Monocular Vision, 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, pp.1-4.(2020.1)



