
長期的な社会課題を捉えたHaneda Robotics Labのプロジェクト
山本 日立は,社会インフラ分野においてさまざまなソリューション事業を展開していますが,そうした社会インフラの中でも,公共施設としての空港は多くの人にとって身近なものといえます。実際に空港運営を担っておられる日本空港ビルデング様が捉えられている目下の課題や,これから実施していこうという取り組みがあれば教えてください。
志水 近年,インバウンド(訪日外国人)のお客様が増加しており,多様化への対応とともに,いかにサービスレベルを維持し,さらに向上を図っていくかが重要な課題だと考えています。現在,羽田空港では約5万人のスタッフが働いていますが,労働生産人口が減少する中で,今後も従来のようにお客様の数に応じてスタッフを増やすことについては人員そのものの確保と対応の質的側面の両面において難しくなると思われます。そこで,今後不足する労働力の一部をロボットや先端技術に置き換えることを視野に入れ,2016年にHaneda Robotics Labを開設し,実証実験のプロジェクトを立ち上げました。
山本 日立も第1期の実証実験に参加させていただきましたが,プロジェクトは2020年を目標とされているのでしょうか。
志水 2020年は第1段階という位置づけです。その後も労働力不足という社会課題が続いていくでしょうし,プロジェクトはその先を見据えたものとなっています。
山本 では具体的に,どのような領域でロボットや先端技術の活用を考えられているのでしょうか。
志水 2016年にスタートした時点では,ロボットと人との親和性が高い「案内」に加え,空港という広い空間をクリーンな状態に維持することも課題となっていることから「清掃」の領域,そして南北約800mという細長い空港の中を移動いただくお客様の負担を踏まえ,「移動支援」を含めた3つのカテゴリーにおいて実証実験を行いました。
2017年の第2期では,セキュリティ強化の観点から「警備」,多言語対応として「翻訳」,人とモノの増加を想定して「物流」の実証実験をしているところです。第1期で17社,第2期で7社の計24社の皆様に参画いただき,各企業様には実導入に耐えうるロボット開発に尽力していただき,私たちはそれを加速させる環境と枠組みをつくり支援していくという立場で取り組みを推進しています。
山本 まずは「案内」からスタートし,多岐にわたり人の手助けをするロボットの活用を考えられているわけですね。第1期では,日立のEMIEW3を案内ロボットとして採用いただきましたが,どのような点に注目されたのでしょうか。
志水 空港の案内業務としては,カウンターでの案内業務のほか,コンシェルジュが館内を移動しながら案内するというようなオペレーションがありますが,例えば案内カウンターでのお客様対応が混雑する状況で,簡易的な案内や移動を伴う案内などをEMIEW3が肩代わりできれば,サービス改善につながると考えました。
また,他の案内ロボットにはサイネージ式など固定型もありますので,これら複数のロボットが連携して案内サービスが提供できる可能性についても期待しました。さらに,本体デザインが可愛らしいEMIEW3の案内を通じて,お客様に新しい体験価値を味わっていただきたいという思いもありました。
Haneda Robotics Labを通じた将来イメージ,およびプロジェクトの設立経緯と枠組み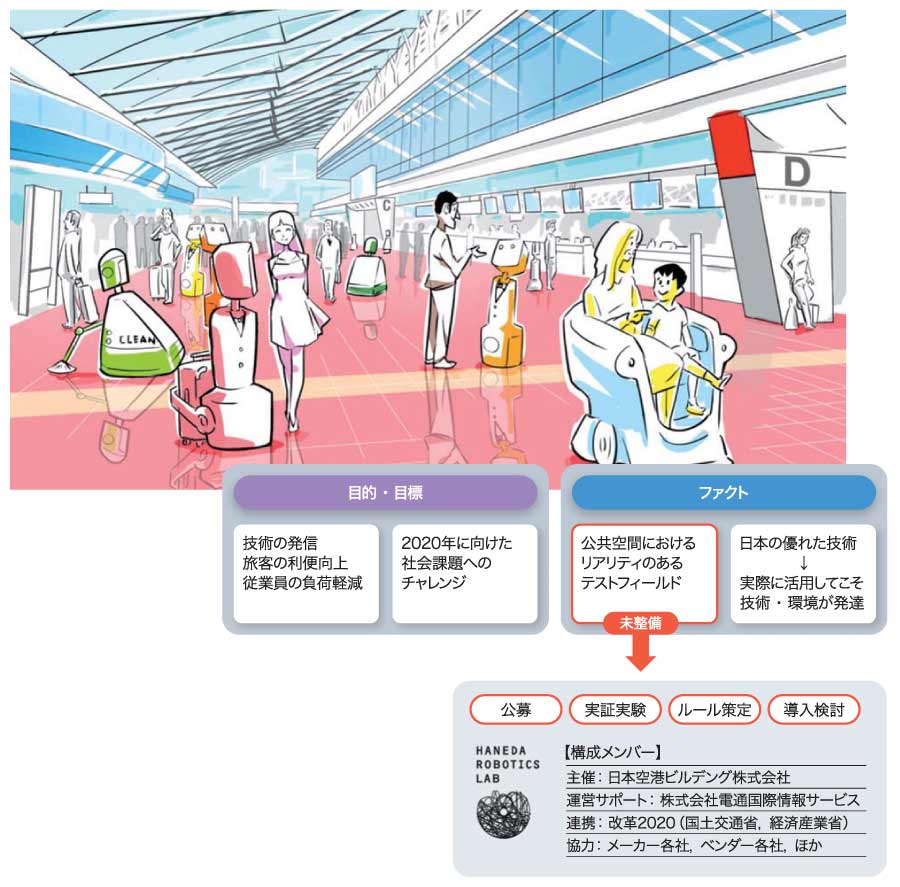
オペレーションを「見える化」するエスノグラフィ調査
![]() 志水 潤一
志水 潤一
日本空港ビルデング株式会社
事業開発推進本部
事業開発部 次長
山本 実際の実証実験は,空港内のアナウンスや大きなガラス窓からの外光,頻繁な人の行き来などがあり,思った以上に厳しい環境でした。また,一口に案内と言っても,出発ロビーや到着ロビーなど場所が違えば,サービスの中身もいろいろ違ってきます。人は実に柔軟に仕事をしているものです。会話シナリオの生成などの点で,そういった認識が当初不足しており,開発者も実証実験の場で気づかされることがありました。
志水 お話のとおり案内業務に限っても,出発ロビーと到着ロビーでは案内の内容も仕方も違いますからね。到着ロビーの案内カウンターでは,バスのチケット販売が大部分を占めている一方,出発ロビーの案内カウンターではフライトや空港施設など総合的な案内業務をしているというのが実態です。
ロボット製品に対するイメージにおいては,私たちにもギャップがありました。「ロボットを導入するとすぐに多くの課題を解決できるのではないか」と期待を膨らませていましたが,実際には,各種業務とロボットの関係における代替可能性や親和性(マッチング)は一律ではなく,きちんと整理し捉えることに大変苦労しています。また,公共空間ですから高い安全性も求められます。代替する業務の範囲や対応する順序,その段階ごとに応じた安全性確保など,これらすべてを満たしてサービスロボットを利活用した空港運用モデルを成立させる必要があるわけです。
山本 そこで私たちは原点に立ち戻って,空港の案内業務の棚卸しをさせていただいたわけです。具体的には,場所・時間帯によって臨機応変に対応する人の仕事の内容をエスノグラフィ調査という方法で,どのようなお仕事がご負担になっており,早期に置き換えられることは何かを調べてみました。
また,その一方で,EMIEW3のブラッシュアップとして,厳しい空港の環境の中でも利用者様との会話を成立させるために,特に音声認識機能の強化を図りました。これら,エスノグラフィ調査を踏まえ,音声認識や移動案内など3回ほどの試験ののち,2017年10月から無人運転の実証もさせていただきましたが,カウンター案内や移動案内など大きな問題もなくサービスできたことで,実用性のあるものに仕上がってきたと手応えを感じています。
志水 そうですね。今回のエスノグラフィ調査を含め,改めて業務の棚卸しを行うことは,人とロボットの協業モデルを考えるうえでも大いに参考になりました。場合によっては人がしたほうがよい案内,人とロボットが協働で行うもの,100%ロボットに置き換えたほうがよいもの,一つ一つの事象を捉えながら選別することに力を入れないと本当の意味での実用性が生まれないことが分かってきました。
ロボットの連携に求められる統合型プラットフォーム
 山本 武志
山本 武志
日立製作所
ビルシステムビジネスユニット
デジタルトランスフォーメーション
推進本部 担当本部長
志水 そのほか,2年間の取り組みを通じて,自律型ロボットを支えるネットワーク環境の重要性も痛感しました。EMIEW3の場合,御社に自前のネットワーク環境を用意していただきましたが,さまざまな領域で複数のサービスロボットを連携し利用者様にサービスを提供するにはその整備が欠かせません。第1段階の2020年に一定レベルの実導入を果たすためには,統合型のプラットフォームの構築が不可欠だと考え,2017年から3か年計画で共通基盤の構築に着手しました。
山本 ロボットの活用は人手不足の解消も大きな目的の一つですから,バックヤードで管理する人たちの問題も見逃すわけにいかないと考えています。
志水 そのとおりです。ロボットが空港ターミナルのどこにいて,どういう動きをしていて,何か問題が起きていないかなどを,自動でチェックする,あるいは最小限の人的リソースで管理するというオペレーションが実現できないかぎりは本末転倒となってしまいます。
山本 確かにバックヤードでおのおののロボットを管理する仕組みと,これら複数のロボットとどうつなげていくかという課題もあります。プラットフォーム上で警備ロボットもつながれば案内ロボットもつながります。監視するプラットフォームは一つでも,それを見る側が多岐にわたっていくことも考えられますから,これをどうするかも問題です。
志水 もしかすると比較的早い段階でサービスロボットのカテゴリーの融合が進むかもしれません。単に案内,警備,翻訳という単体の機能ではなく,例えば案内と警備が一体となったサービスのようなものが出てくる可能性もあります。その検討も今後の実験での重要な課題となっています。
日本の最先端ロボット技術のショーケースとして
山本 カテゴリーの融合に通じると思いますが,ロボットの連携によって生まれてくる価値もいろいろとあると考えています。
志水 そのとおりです。今回,空港という公共施設のプロジェクトということもあって,メーカーの垣根を越えた連携ができているので,弊社(日本空港ビルデング)や各社のアイデアの持ち寄りにより,新しいロボットサービスが実現できるのではないかと期待しています。例えば,空港内のレストランを案内するロボットからお客様を引き継いで,実際の誘導はEMIEW3が行い,お客様がお店に到着する前に予約が完了しているというようなことが実現できるかもしれません。また,物流ロボットとの連携では,チェックインから搭乗ゲートまで手ぶらで行けるといったことも考えられます。いずれにしても,将来的に求められているのは高い次元のサービスのはずです。どういう世界を実現するのが利用者に喜ばれるのか,じっくり見極めながら取り組んでいきたいです。
山本 EMIEW3は公共空間への適用を想定しており,今回のHaneda Robotics Labへの参画を機に,他社との連携を含めて,より質の高い空港サービスに寄与できればと考えています。
もちろん, EMIEW3自体のさらなる強化に加え,社会インフラ向けソリューションをフルセットで提供できる日立の特長を生かし,バックヤードでの他社ロボットを含めた管理をはじめ,お客様の負担が増えないような場の管理もトータルでお手伝いできると考えております。
志水 インフラ事業を展開している御社には,インフラとサービスロボットを含めたプラットフォームをどうつなげていくかについてなど,適切なアドバイスを頂きたいと思っています。
Haneda Robotics Labの大きな目的は,スタッフの負担低減や業務効率化とともに,利用者に対して安全・安心・便利で質の高いサービスを持続的に提供することですが,日本のロボット技術によってそうした世界が実現できるということを,羽田空港を舞台として国内外に情報発信することも重要な目的の一つです。年間8,000万人近くに利用されるこの羽田空港を,ロボティクスをはじめ,日本の先端技術のショーケースにしたいと考えています。クリアすべき課題は少なくありませんが,日本の社会課題の解決につながるような取り組みに,これからも先陣を切ってチャレンジしていきます。
山本 日立も,羽田空港様のお力をお借りし,さまざまな協創を通じて社会に求められる新しいサービスをつくっていきたいと考えています。今後もぜひお力添えを頂きたいと思います。本日は,どうもありがとうございました。
羽田空港でのEMIEW3の実証実験(第2期,2017年)


