社会インフラを支える基幹系ユーティリティ・プロダクト
物流センターにおける大きな課題として,短時間に大量の商品を出荷する能力の確保と,これに相反する現場の人手不足が挙げられる。これらに起因する現場の負担増に対応するため,日立はIoT,ビッグデータ解析,AIなどを活用したデジタルソリューションに加え,自動搬送型ピッキングシステムなどのプロダクツにより物流センターの高度化に取り組んでいる。本稿では,その取り組みと展望を紹介する。


物流センターでは,膨大な商品在庫の中から多種多様な注文に従って商品を出荷する作業を,迅速かつ正確に処理することが求められている。これらの作業は,受注確定後に取り掛かるため事前準備を行うことができず,作業の効率化が求められている。
一部の作業ではマテリアルハンドリング(以下,「マテハン」と記す。)設備を導入することで省力化を進めているが,未だ人手による作業に頼っているものも多い。加えて作業者不足が加速しており,省人化と作業効率向上が喫緊の課題となっている1),2),3)。これに対し,現場の作業データの分析と活用による効率化や,ロボット導入による省人化が求められており,現場の繁忙対策として多様なアプローチが研究されている。作業データの活用とロボット化に加えてIoT(Internet of Things)やAI(Artificial Intelligence)などのデジタルソリューションを活用することで,個々のセンターを取り巻くサプライチェーン全体についても効率化が可能になる。
本稿では,日立が考える物流センターとサプライチェーンの全体像,次世代ロジスティクスについて紹介する。
図1|現状の物流センターの構成 物流センターは,保管・ピッキングエリアを中心に,入荷作業スペース,梱包エリア,出荷作業スペースなどから構成される。
物流センターは,保管・ピッキングエリアを中心に,入荷作業スペース,梱包エリア,出荷作業スペースなどから構成される。
図2|Racrewと保管棚の外観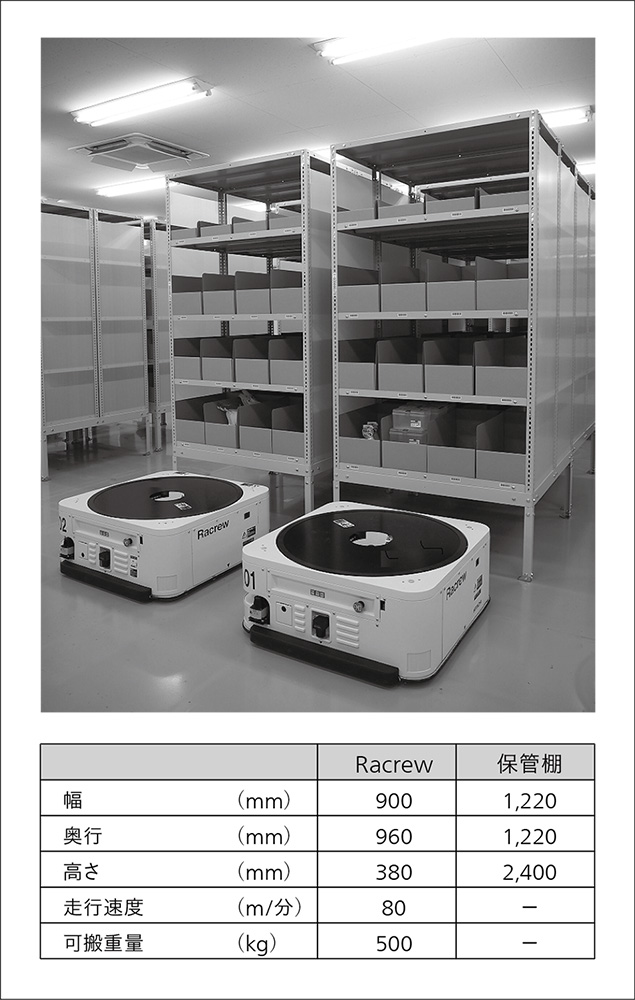 Racrewと保管棚の外観(上)と仕様(下)を示す。
Racrewと保管棚の外観(上)と仕様(下)を示す。
従来の物流センターは,入荷作業スペース,保管・ピッキングエリア,梱包エリア,出荷作業スペースから構成されている(図1参照)。また,保管・ピッキングエリアには,自動倉庫やコンベヤ,ソータなどのマテハン設備が導入されている。出荷にあたっては,目的の商品を倉庫の棚や自動倉庫から集めるピッキング作業が不可欠になっている。
一般的なピッキングは,ピッカーと呼ばれる作業者が帳票リストや端末を見ながら倉庫内を歩いて商品を集品しているが,この作業の大半は歩行時間であり身体的な負担も大きく,効率化が難しい部分であった。このピッキング作業を効率化するために小型・低床式無人搬送車「Racrew」を開発し,自動搬送型ピッキングシステムとすることで問題を解決した(図2参照)。Racrewは商品が保管されている棚を作業者に代わってピッキングステーションと呼ばれる作業スペースまで搬送するため,作業者の歩行時間・移動量を大幅に削減して身体的な負担を軽減でき,作業者がピッキングに集中できることから従来の方法に対して作業効率を約3倍に向上することが可能となった。また,必要な商品情報をDPS(Digital Picking System)や端末などの装置に表示することで,経験の浅い作業者でも一定の作業効率が得られること,集めた商品の誤り率が大幅に改善されることが利点として挙げられる。
図3|基本システムとシステムの拡張 Racrew約50台,約10か所のピッキングステーションを基本システムとして,これを並列接続することで大規模システムにも対応している。
Racrew約50台,約10か所のピッキングステーションを基本システムとして,これを並列接続することで大規模システムにも対応している。
Racrewによるピッキングシステムは,扱う物量によりその規模を決定するが,基本的なシステムは約50台のRacrewと約10か所のピッキングステーション,前後のコンベヤシステム,自動倉庫と,それらを制御するWCS(Warehouse Control System)により構成されている。作業を効率的に処理するため,WCSが出荷の順序,搬送する棚の順序,ピッキングの順序を制御している。また,WCSは,物流センター全体を管理するWMS(Warehouse Management System)の下で,データ連携しながら運転している。
大規模なシステムの場合は,上記のシステムを並列に接続することで対応が可能になっている(図3参照)。国内では6並列として250台規模のRacrewを自動倉庫,コンベヤラインと共に運用した事例があり,今後予想されるセンターの大規模化に対しても,柔軟に対応することが可能である。
図4|次世代WMSと高度化WCSの連携 物流センター内のあらゆる物流情報,操作情報をデータベース化し,現場を見える化する。また,次世代WMSとデータ連携し,ビッグデータ解析・AIなどのデジタルソリューションを活用することで,リソース計画・作業スケジュールの最適化,センターの最適化が行える。
物流センター内のあらゆる物流情報,操作情報をデータベース化し,現場を見える化する。また,次世代WMSとデータ連携し,ビッグデータ解析・AIなどのデジタルソリューションを活用することで,リソース計画・作業スケジュールの最適化,センターの最適化が行える。
WCSには,物流センター内の物流データのほか,Racrewや自動倉庫の動作情報,端末の操作情報など,現場のOT(Operational Technology)データが集まってくる。これらを収集してデータベース化することでその付加価値が高まる。WCSが扱う現場の戦術的なデータをWMSに送り,物流センター全体に関する戦略的なデータを加味して評価することで,センターの最適化計画などへの活用が可能になる。日立が提供するAIソリューションを活用することで,従来は経験者のノウハウに頼っていたイベントや季節に応じた物量変動の予測と配置の検討などが可能になると考えられる。さらに,各地の物流センターのデータを集め,ビッグデータ解析ソリューションを活用して経営戦略レベルのダッシュボードを実現し,各拠点をつないだSCM(Supply Chain Management)への戦略的アプローチも可能になると考えられる(図4参照)。
これらを視野に入れて,現在,上位連携に対応できるWCSとデータベースの構築を進めており,時々刻々と変化する現場の状況の把握や,課題の抽出,上位システムとのデータ連携で付加価値の高いシステムを提供していく。
図5|ダッシュボードによる現場の見える化 現在の現場の状態を見える化することで作業の進捗状況を把握し,作業の優先度や人員配置の見直しがダイナミックにできるようになる。
現在の現場の状態を見える化することで作業の進捗状況を把握し,作業の優先度や人員配置の見直しがダイナミックにできるようになる。
WCSが扱う現場のOTデータを分析することで,現場の作業効率改善や各マテハン機器のメンテナンス作業に対して戦術的なアプローチが可能になってくる。日立では現在,これらのデータを集計してダッシュボードに表示することで現場の見える化をめざしている。データベースに蓄積されるマテハン機器の動作や作業者の操作に関するデータを集計して現場の管理者,作業者に対し見える化することで,日々の作業の進捗状況を把握し,作業の優先度や人員配置の見直しがダイナミックにできるようになる。これらのデータを突き合わせて検討することで,現場の運用改善にも効果を発揮する。機器の運転データから,計画的なメンテナンスの実施も可能になる(図5参照)。
図6|将来の物流センターの構成 ピッキングシステムを中心に,前後工程の搬送にRacrewを活用するべく検討を進めている。さらに,ロボットを組み合わせて将来的な物流センターの構築をめざす。
ピッキングシステムを中心に,前後工程の搬送にRacrewを活用するべく検討を進めている。さらに,ロボットを組み合わせて将来的な物流センターの構築をめざす。
前述のとおり,昨今の労働人口減少の問題は,物流センターにおいても作業者不足の形で影響を与えている。従来,人が行っていた作業をロボットに置き換えて省人化を図るアプローチは,日立においても研究が続けられており,ピッキング作業に関してもロボットが商品をピッキングする方式の開発が続けられている。
現場の物流センターにおいては,ピッキング作業の前後の工程にも省力化すべき課題がある。例えば,前工程では需要動向に応じた商品の入替作業や配置換え,後工程ではピッキングの完了した商品の発送先ごとの集約,検品・梱包・出荷作業への搬送の自動化などが挙げられる。現在のマテハン機器では,自動倉庫を利用した発送先ごとの商品の集約,コンベヤやソータを使った搬送が行えるが,これらのシステムでは設備自体が大きくなり,将来のライン変更などに対応する柔軟性が低くなってしまう。日立では,前工程における商品の入れ替えや,後工程における工程間搬送についても,Racrewの活用を検討している。Racrewを使うことで,ライン変更に対する柔軟性の高いシステムを提供し,これらとロボットを組み合わせることによって,将来的には省人化物流センターの実現をめざしている(図6参照)。
本稿では,物流センターの高度化に対する日立のソリューション,プロダクツに関する取り組みと今後の展望を紹介した。
物流は社会インフラとしてその重要度がますます高まっている。処理能力が高く省人化の進んだ物流センターの構築に向けて,日立の総合力を集結し,顧客との協創を通じて課題解決を進めていく。
