
安全・快適で高効率な移動・輸送を実現するモビリティ制御技術
執筆者
髙橋 絢也Takahashi Junya
- 日立製作所 研究開発グループ 制御イノベーションセンタ 制御プラットフォーム研究部 所属
石郷岡 祐Ishigooka Tasuku
- 日立製作所 研究開発グループ 制御イノベーションセンタ 制御プラットフォーム研究部 所属
勝田 敬一Katsuta Keiichi
- 日立製作所 研究開発グループ 制御イノベーションセンタ 輸送システム制御研究部 所属
執筆者の詳細を見る
髙橋 絢也Takahashi Junya

- 日立製作所 研究開発グループ 制御イノベーションセンタ 制御プラットフォーム研究部 所属
- 現在,制御機器の自動/自律化と,その社会実装に向けた研究マネジメントに従事
- 博士(工学)
- 自動車技術会会員
- JSAEプロフェッショナルエンジニア
- 日本機械学会会員
- 日本燃焼学会会員
石郷岡 祐Ishigooka Tasuku

- 日立製作所 研究開発グループ 制御イノベーションセンタ 制御プラットフォーム研究部 所属
- 現在,自律制御システム向け安全設計,ソフトウェアプラットフォームなどの研究開発に従事
- 博士(情報学)
- IEEE会員
- 情報処理学会会員
勝田 敬一Katsuta Keiichi

- 日立製作所 研究開発グループ 制御イノベーションセンタ 輸送システム制御研究部 所属
- 現在,鉄道,建機,自動車などモビリティの自動自律制御技術の研究マネジメントに従事
- 博士(工学)
- MIET(英国工学技術学会会員)
- FIRSE(鉄道信号技術者協会フェロー)
- 電気学会会員
- 日本信頼性学会会員
ハイライト
物流事業におけるドライバー不足や,交通事故による人的・経済的損失といった社会課題を解決し,フリクションフリーな移動を提供するモビリティシステムにおいて,自動運転制御は一つのキー技術となる。ここでカーブや交差点が数多くある市街地環境での移動・輸送システムに自動運転を適用する場合,車両単体でのセンシングや自動走行性能向上,高信頼化に加え,他車両やインフラシステムと連携した制御技術が必要となる。
本稿では,その実現に向けた日立の取り組みの事例として,安全性・快適性と移動効率を両立する隊列走行制御技術,交差エリアでの交通流制御技術,そしてモビリティの自動制御そのものの信頼性を支える縮退設計技術を紹介する。
1. はじめに
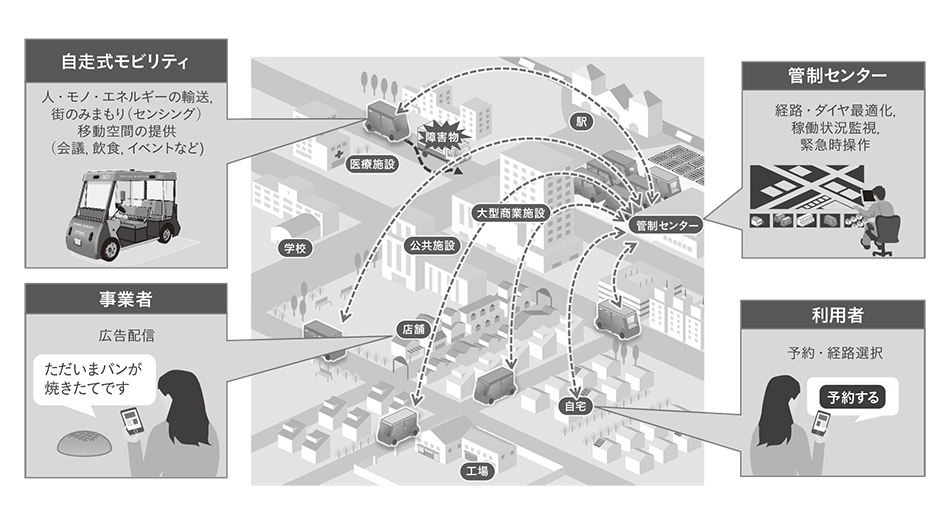
図1|自走式モビリティを使ったモビリティサービスのイメージ 自走式モビリティは,単なる移動手段としてだけではなく,街の様子のセンシング,地域住民と事業者間の情報インタフェースといったさまざまな役割を担う。
クルマの安全性,快適性向上は,長年にわたり自動車に要求されている性能であり,特にドライバーの操作ミス(ヒューマンエラー)による事故を低減するため,自動運転技術の開発,実用化が進められている。自動運転技術は,ドライバー操作をゼロにすることで,ヒューマンエラーによる事故を低減するだけではなく,ドライバーレスモビリティという新たなクルマの形を実現でき,モビリティ社会に大きな変化をもたらす原動力となる。そのため,ITベンダーを含めた非自動車メーカーが,自動運転を使った新たなモビリティビジネスの可能性の模索・検証を始めており,また自動車メーカーも従来の車両販売型のビジネスから,モビリティサービス事業者としてのビジネス展開を検討している。
図1に自動走行可能な自走式モビリティを使ったモビリティサービスの一例を示す。自走式モビリティは管制センターにより運行が管理されており,利用者,事業者および自走式モビリティの情報を管制センターに集約し,適切に配信することで,自走式モビリティが地域の移動・輸送手段だけではなく,情報の伝達手段としても活用され,地域の事業者と利用者をつなぐキーアイテムとなり得る。このようなモビリティサービスを実現するうえで,自走式モビリティを運行する管制制御技術,予期せぬ障害に対する立ち往生を回避する遠隔操作制御技術,管制センターと自走式モビリティをつなぐ安定したセキュアな通信技術,そして管制や他車両と連携した自走式モビリティの自動運転制御技術など,さまざまな技術が必要となる。中でも自動運転制御技術は,安全性に加え,利用者の移動に対する快適性に直接寄与するものであり,フリクションフリーなモビリティシステムを社会実装するうえで重要な要素技術となる。
2. 安全・快適で高効率な移動・輸送を支える制御技術
今回,市街地のようなカーブや交差点が数多くある環境においても,安全で快適,かつ高効率な移動を可能とする自動運転の実現に向けた取り組みの事例として,安全性・快適性と移動効率を両立する隊列走行制御技術,交差エリアでの交通流制御技術およびモビリティの自動運転制御そのものの信頼性を支える縮退設計技術を紹介する。
2.1 安全性・快適性と移動効率を両立する隊列走行に向けた走行制御技術
前方の車両に追従して後続車両が自動的に車間距離,速度を調整する後続車無人システムは,トラック輸送における省人化を実現する技術として着目されており,「高度な自動走行システムの社会実装に向けた研究開発・実証事業」の一環として,国土交通省および経済産業省の主導により,高速道路での実証が進められている1)。今後,市街地や一般道での物流,人の移動手段においても,移動効率を考慮しながら,目的地や用途などのユーザー利用状況に応じた柔軟な移動を提供するうえで,小型車両による隊列走行は有用な技術となり得る。
市街地や一般道のような走行環境では,高速道路と比較し,カーブ路の走行シーンが多く,それに対する加減速制御が移動時間や安全性に影響すると同時に,乗員の快適性に強く影響する。今回,カーブ路走行時の加減速変化を好適に変化させる技術として,熟練ドライバーの運転行動より抽出した「G-Vectoring」2)を隊列走行に適用可能とする「Cooperative G-Vectoring」を提案した3)。これにより,隊列走行においても安全かつ快適で,移動効率のよい走行制御を実現する。
G-Vectoringでは,旋回開始/終了といった横加速度が変化する過渡期において適切な加減速制御をすることで,旋回時の安全性と移動効率を両立させ,さらに旋回と加減速が連係した乗員にとって好適な加速度変化を提供する2)。しかし,本技術をそのまま従来の隊列走行制御に適用した場合,先頭車両の加減速タイミング・量に基づいて後続車の加減速が行われるため,カーブ進入タイミングが異なる後続車において,車両に発生する加速度が好適に変化しない[図2(a)参照]。また隊列走行する各車両に個別にG-Vectoring制御を適用した場合,カーブ進入時の減速タイミングの違いにより,隊列車両間の車間距離が短くなり,移動効率を重視した短車間距離での隊列走行が困難となる。そこで,車両間でG-Vectoringによる制御パラメータを共有し,先行車のG-Vectoring制御量を考慮した加減速を後続車から開始することで,車間距離を設定値よりも短くすることなく,隊列内すべての車両の加速度変化を好適にできることをシミュレーションにより確認した[図2(b)参照]。これにより安全性を確保しながら,乗員の快適性を考慮した走行制御技術として,今後,市街地での隊列走行への展開が期待できる。
図2|隊列走行でのカーブ路通過におけるCooperative G-Vectoringの効果 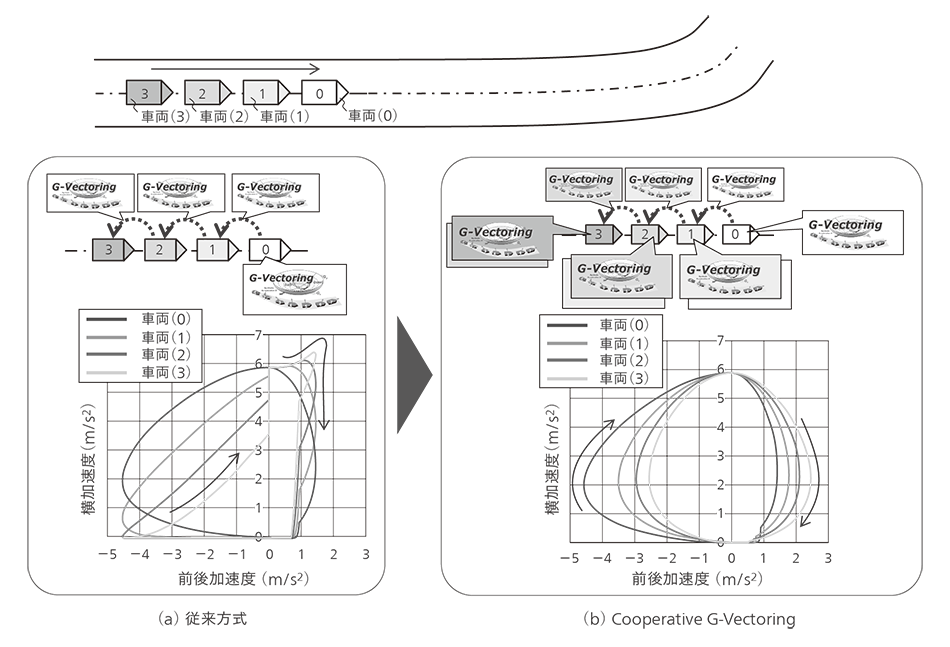 隊列走行にてカーブに進入する場合の各車両の加速度変化を,加減速により発生する前後加速度と操舵により発生する横加速度の関係図にて視覚化すると,(a)従来方式では先頭車両の加減速情報により後続車両が制御されるため,後続車両(2),(3)では乗員に好適とされる円弧状の加速度変化とはならない。これに対し, (b)Cooperative G-Vectoringでは,先行車情報を用いて後続車からカーブに対する加減速制御を行うことで,すべての隊列車両にて円弧を描く加速度変化となる。
隊列走行にてカーブに進入する場合の各車両の加速度変化を,加減速により発生する前後加速度と操舵により発生する横加速度の関係図にて視覚化すると,(a)従来方式では先頭車両の加減速情報により後続車両が制御されるため,後続車両(2),(3)では乗員に好適とされる円弧状の加速度変化とはならない。これに対し, (b)Cooperative G-Vectoringでは,先行車情報を用いて後続車からカーブに対する加減速制御を行うことで,すべての隊列車両にて円弧を描く加速度変化となる。
2.2 安全性と移動効率を両立する交差エリアでの交通流制御技術
クルマの自動運転実現に向けては,交差点における事故を防ぎ,円滑な交通流を実現することも重要な課題の一つである。交差点の交通流制御に関しては,すでに数多くの研究4)~9)がなされているものの,その多くは,高性能な計算機を活用して,車両ごとに交差点への適切な進入タイミングや適切な進入速度を計算する必要がある。また,伝送遅延や応答遅れなどの外乱の影響も適切に考慮する必要があり,無数にある小規模な交差点に普及させる方法としては,論理実装の複雑さとその開発コストが懸念された。そこで近年,日本にも普及し始めたラウンドアバウトと呼ばれる環状交差点の考え方と,占有権を与えられた列車だけがその区間を走行できるという,古くから鉄道で使われている閉塞制御の仕組みを組み合わせた交通流制御技術を開発した。
具体的には,交差点内をいくつかのエリアに分割し,管制側と車両側との間で,エリアごとに設定した一つの進入権を,エリア数と同数用意した電子トークンを用いてやり取りする仕組みである。車両側は,交差点内をラウンドアバウト式に走行し,その際,走行を企図するエリアごとに管制側に進入権を要求し,管制側から電子トークンとともに進入権を与えられた場合のみ,そのエリアに進入できる。
この仕組みを図3に示す四差路交差点の交通流シミュレータに実装し,各道路から100~600台/hの交通流を発生させた場合の各車両の挙動を検証したところ,わずかな情報量のデータを管制側と車両側でやり取りするだけで,常にエリアに進入する車両数を1台以下,かつ交差点内に進入する車両をエリア数以下に制限できること,そのうえで円滑に交通流を制御できることを確認した。
なお,本手法のアルゴリズム10)は,交差点に限らず汎用性を持ち,例えば車線合流地点の交通流制御にも応用できる。今後,自動運転車両群の進路が交錯するさまざまな場所での交通流制御への応用を検討していく。
図3|電子トークン(α,β,γ,δ)を用いたラウンドアバウト交差点における交通流制御の効果 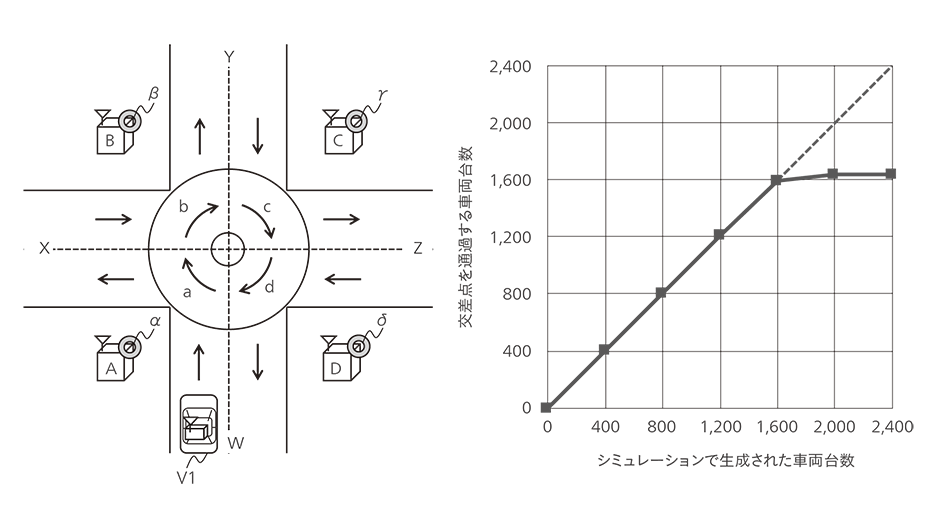 進入権はエリアごとに一つ,進入権を伝達する電子トークンはエリア数と同数用意することで,交差点内の交通流は安全かつ円滑に制御される。シミュレーションでは,1,600台/h(各道路から400台/h)の交通流まで渋滞を生じさせずに制御できることを確認し,ラウンドアバウトにおける交通流制御としては妥当な結果が得られた。
進入権はエリアごとに一つ,進入権を伝達する電子トークンはエリア数と同数用意することで,交差点内の交通流は安全かつ円滑に制御される。シミュレーションでは,1,600台/h(各道路から400台/h)の交通流まで渋滞を生じさせずに制御できることを確認し,ラウンドアバウトにおける交通流制御としては妥当な結果が得られた。
2.3 自動運転制御の信頼性を支える縮退設計技術
自動運転システムではハードウェア故障の発生や,センサー・アルゴリズムが期待する性能を発揮できない天候不良といった環境条件の状況下にあっても,安全な場所まで安全性を保ちつつ走行し続けることが望まれる。有望視される技術に,自律化が進んでいる宇宙・航空システムで用いられているGraceful Degradation(緩やかな縮退)がある。特性の異なるセンサーが冗長に搭載された自動運転システムにGraceful Degradationを適用するためには,10個以上の各センサーに対して多数の性能低下要因をそれぞれ分析し,それぞれの縮退機能を設計することとなり,膨大な設計工数を要するという課題がある。また,安全保証上,事象が発生してから縮退機能への切り替え処理を制約時間内に終えることを保証する必要があるが,従来のリアルタイム性解析手法では,システム状態を区別せずに各処理の最長実行時間の総和で評価するために,実際よりも悲観的な結果となり,正確な切り替え時間を把握できないという課題がある。
これらの課題解決にあたり,性能低下要因に応じて段階的に縮退可能とするGraceful Degradation設計・検証手法を構築し,プロトタイプでその妥当性を確認した11)(図4参照)。提案する設計手法では,ハードウェア故障と走行条件によって本来の性能を発揮できない性能限界に対する縮退設計を独立して実施し,その後に同時発生する状況を分析する。これによって,性能低下要因は異なるが,性能低下後の使用可能な制御機能が同じ場合に,縮退設計の再利用が可能となり,高信頼な自動運転システムの設計工数を削減できる。さらに各マイコンにおける検知・判断・縮退制御処理の最長時間と,縮退設計で定義した性能低下要因と縮退制御の対応関係に基づいて,リアルタイム性解析をすることで,実際に起こり得る縮退パターンのみの切り替え時間を評価可能とした。
10個を超えるセンサーが搭載された自動運転レベル3システムのプロトタイプに前述の提案手法を適用した結果,性能低下要因のうち86.1%に対して自動運転を継続可能とできる見込みを得ている。また,リアルタイム性解析においては,従来技術と比べ,35.3%の精度向上を確認しており,今後,自動運転システムの縮退設計・検証に展開していく。
図4|自動運転システムの段階的縮退を可能とするGraceful Degradation設計・検証手法 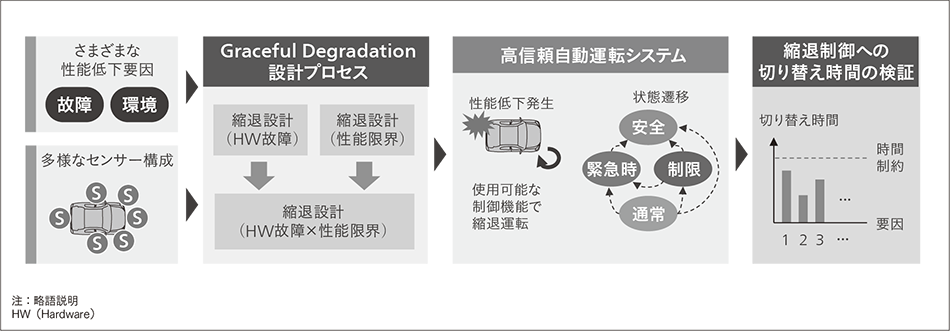 多様なセンサー構成の自動運転システムで起こり得る性能低下要因を段階的に分析することで,効率的な縮退設計を可能とする。また,縮退制御への切り替え時間検証に状態遷移情報を用いることで,各々の状態遷移に要する切り替え時間が時間制約を満たすことを高精度に評価できる。
多様なセンサー構成の自動運転システムで起こり得る性能低下要因を段階的に分析することで,効率的な縮退設計を可能とする。また,縮退制御への切り替え時間検証に状態遷移情報を用いることで,各々の状態遷移に要する切り替え時間が時間制約を満たすことを高精度に評価できる。
3. おわりに
社会におけるクルマのあり方が大きく変わり,自動運転を使ったさまざまなモビリティサービスが提案される中,その社会実装には,安全性,快適性,そして経済性を支えるさまざまな技術が必要となる。
本稿ではその実現に向けたいくつかの開発技術を紹介したが,これらの技術に加え,移動体そのもののセンシングから走行制御,そして他のインフラシステムとのセキュアな連携を含めた技術を,クルマの運転支援から自動運転まで幅広く展開し,人々の移動・輸送を支えるモビリティシステムの社会実装に貢献していく。
参考文献など
- 1)
- 経済産業省ニュースリリース,高速道路における後続車無人システム(後続車有人状態)を用いたトラックの隊列走行の公道実証を開始します(2019.1)
- 2)
- M. Yamakado et al.: Improvement in Vehicle Agility and Stability by G-Vectoring Control, Vehicle System Dynamics, Vol.48, pp.231-254(2010.12)
- 3)
- 髙橋絢也,外:隊列走行に対するG-Vectoring制御の適用検討,自動車技術会論文集,Vol.50,No.5,pp.1383~1389(2019.9)
- 4)
- Volvo Car Corporation: Volvo Car Corporation tackles changes in driving behaviour with new safety systems
- 5)
- K. Dresner et al.: A Multiagent Approach to Autonomous Intersection Management, Journal of Artificial Intelligence Research, vol.31, pp.591-656(2008.3)
- 6)
- 小木津武樹,外:自動車の自動運転における管制システムを介した交差点走行制御に関する研究,自動車技術会論文集,Vol.41,No.6,pp.1273~1278(2010.11)
- 7)
- J. Lee et al.: Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm Under the Connected Vehicles Environment, IEEE Transactions on Intelligent Transportation Systems, Vol.13, Iss.1, pp.81-90(2012.3)
- 8)
- W. Wu et al.: Distributed Mutual Exclusion Algorithms for Intersection Traffic Control, IEEE Transactions on Parallel and Distributed Systems, vol.26, Iss.1, pp.65-74(2015.1)
- 9)
- 岡田成弘,外:自動運転車の円滑な走行を実現するための空間情報基盤を介した協調走行に関する研究,自動車技術会論文集,Vol.47,No.5,pp.1197~1204(2016.9)
- 10)
- 勝田敬一,外:電子トークンを用いた交差点交通流制御方法,自動車技術会論文集,Vol.51,No.5,pp.836~841(2020.9)
- 11)
- T. Ishigooka et al.: Graceful Degradation Design Process for Autonomous Driving System, 38th International Conference on Computer Safety, Reliability and Security(SAFECOMP), pp.19-34(2019.8)



