
[ⅱ]安全・安心を提供する自動運転技術・電動化安全・安心・快適を実現する車両統合制御技術
執筆者
上野 健太郎Ueno Kentaro
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
髙橋 絢也Takahashi Junya
- 日立製作所 研究開発グループ 制御・ロボティクスイノベーションセンタ 自動運転研究部 所属
仁井原 建Niihara Tatsuru
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
鈴木 圭介Suzuki Keisuke
- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
執筆者の詳細を見る
上野 健太郎Ueno Kentaro

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
- 現在,車両統合制御の開発に従事
- 自動車技術会会員
髙橋 絢也Takahashi Junya

- 日立製作所 研究開発グループ 制御・ロボティクスイノベーションセンタ 自動運転研究部 所属
- 現在,鉄道,建機,自動車などのモビリティ,およびインダストリー向け制御機器の自動/自律化と,その社会実装に向けた研究マネジメントに従事
- 博士(工学)
- JSAEプロフェッショナルエンジニア
- 自動車技術会会員
- 日本機械学会会員
- 日本燃焼学会会員
仁井原 建Niihara Tatsuru

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
- 現在,車両統合制御の開発に従事
- 自動車技術会会員
鈴木 圭介Suzuki Keisuke

- 日立Astemo株式会社 技術開発統括本部 次世代シャシー開発本部 車両統合制御技術開発部 所属
- 現在,6自由度制御開発に従事
- 電気学会会員
- 自動車技術会会員
ハイライト
交通事故撲滅は社会の不変の要請であり,自動車の安全を実現するためには「走る」,「曲がる」,「止まる」といった運動を作り出すシャシー系/パワートレイン系デバイスが重要な役割を担う。これらのデバイスを統合的に制御することで,移動における安心や快適といった新たな価値創出に寄与するものと考える。
本稿では,安全・安心・快適な移動を実現する制御技術として,加速度や加速度の変化が小さく快適な移動を可能とするDynamics planning,カーブ走行時の加速度変化を好適にする設計指針,高速道路の車線変更時にドライバーや乗員に不快感を与えない乗員負荷低減技術,そして電動化車両の特徴を生かしたスムーズな発進/停止を可能とする振動抑制制御技術について紹介する。
1. はじめに
自動車業界は大規模な電動化や自動運転の潮流の中にあり,事故ゼロをめざした自動運転や先進運転支援システムの開発が世界規模で進められている。また,安全技術が向上するにつれて,次の技術として乗員の快適性にも注目が集まっている。
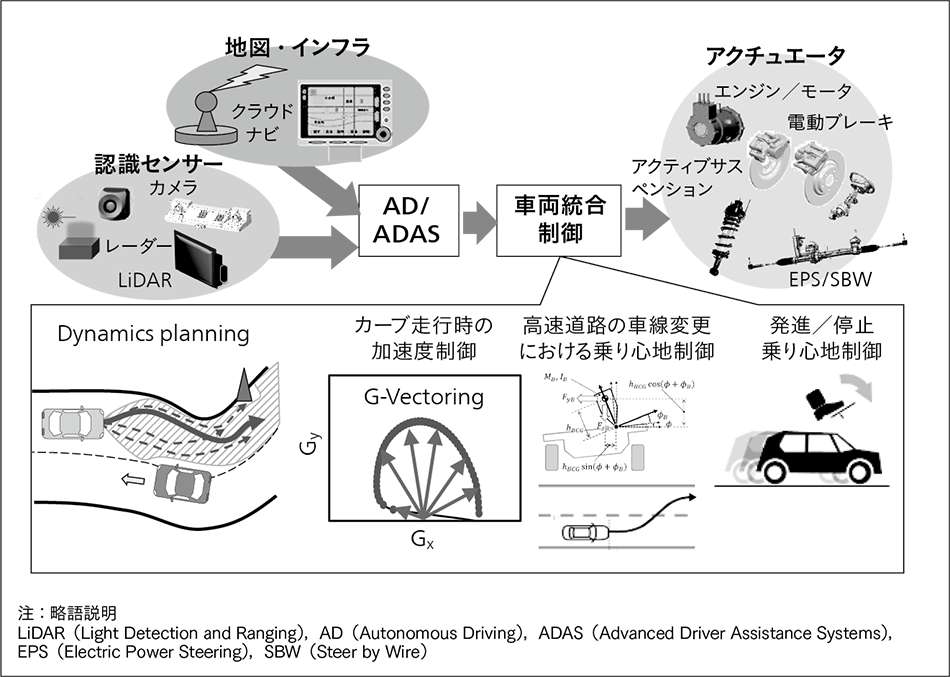
日立は車両運動性能を左右するEV(Electric Vehicle:電気自動車)関連製品,ブレーキ,ステアリング,サスペンションなどに加えて,環境センシング技術などを有しており,これらを協調させ統合する車両統合制御技術を開発している。開発した車両統合制御技術は自動車の安全・安心・快適の実現に大きく寄与するものであり,本稿ではその技術について述べる(図1参照)。
図1|車両統合制御 シャシー系/パワトレ系デバイスやセンシング技術を統合制御して安全・安心・快適な移動を実現する。その技術としてDynamics planning,カーブ走行時の加速度制御,高速道路の車線変更における乗り心地制御,発進/停止乗り心地制御などがある。
2. Dynamics planning技術
自動運転技術の開発では,車両を安全に目的地まで走行させるシステムの構築が必要となる。同時に自動運転のレベルが上がるにつれて,ドライバーは運転操作から解放されさまざまな過ごし方ができるようになり,車室内の快適さは特に重要な要素となる。車室内を快適に保つために,例えば運転の上手な熟練ドライバーはカーブを曲がる際に車線幅を有効に利用した緩やかな経路を描き,曲がり具合や進入速度に応じて適切に速度をコントロールし,走行により生じる前後左右の加速度や加速度の変化を小さく滑らかにしている。しかし,現在の一般的な先進運転支援システムの場合,車線に合わせた中央寄りの経路を一定速度で走行するため,左右の加速度の違いや加速度の大きな変化が発生し,車室内の快適性を損ない乗り物酔いなどを引き起こす可能性がある。
日立が開発しているDynamics planningは,自動運転や先進運転支援システムによる走行において,熟練ドライバーのように車室内を快適に保って走行するためのアルゴリズムである。
Dynamics planningは入力として,車両前方の走行可能領域を用いる。この走行可能領域は,カメラなどの外界認識センサーや地図情報,将来的にはインフラからの交通情報などから取得する。Dynamics planningは走行可能領域の幅を有効に利用して,カーブを曲がる際などにはなるべく緩やかなカーブを描くことで,車両にかかる加速度や加速度の変化を抑えた経路を計画する。また,その経路に沿って走行した際に生じる加速度が,小さくかつ緩やかになるような速度を計画する。
このような軌道計画をする場合,従来の手法では車両の重量や車長などの車両諸元を用いて複雑な計算を行うため,高い演算能力が必要となり,また,強い風の力や路面の凹凸などによる意図しない外乱要素で車両が快適に走らない場合があるという課題があった。Dynamics planningは,車両諸元や外乱要素への対応を独自の車両制御技術で担うことにより,これらの課題を解決し,シンプルな軌道計画を実現するものである。
これを用いることにより,自動走行車両において熟練ドライバーのように緩やかな経路を適切な速度で運転することができ,前後左右の加速度や加速度の変化を抑制した快適な走行が可能となる(図2参照)。
図2|Dynamics planningシミュレーション例 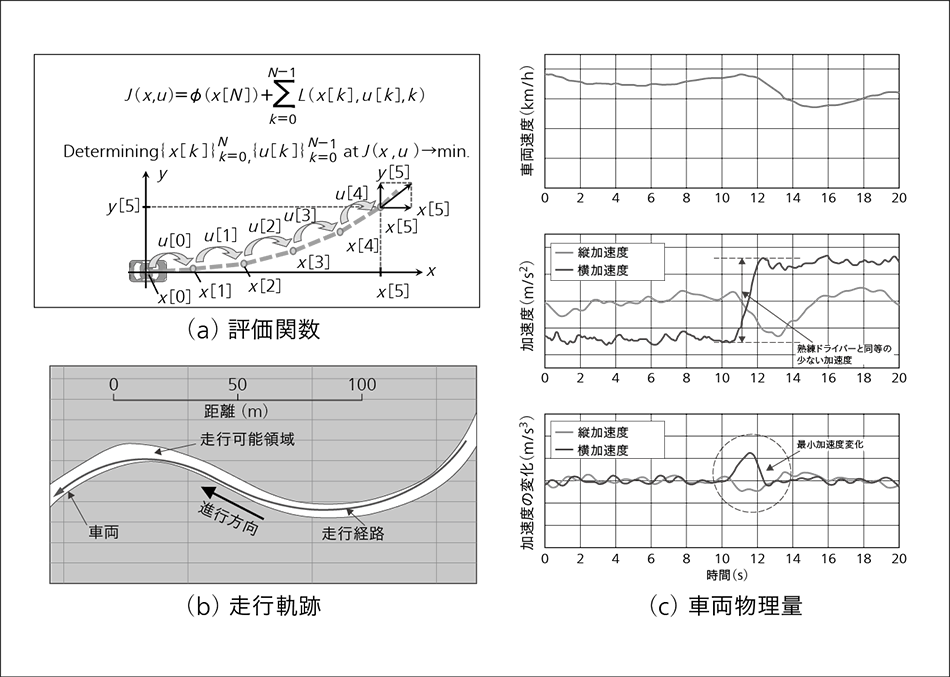 評価関数を設定してそれを最小にすることで,走行可能領域の幅を活用した経路と速度を計画する。計画した経路に沿って計画した速度で走行することにより,生じる加速度や加速度の変化(Jerk)が抑えられる。
評価関数を設定してそれを最小にすることで,走行可能領域の幅を活用した経路と速度を計画する。計画した経路に沿って計画した速度で走行することにより,生じる加速度や加速度の変化(Jerk)が抑えられる。
3. カーブ走行時の加速度制御と設計指針
どのような走行が乗員にとって「よい運転」か,という問いに対し一意に解を与えることは難しいが,自動走行の設計にあたっては何らかの指針が必要となる。
日立はこれまで熟練ドライバーの運転操作を「よい運転」の指針として捉え,特にカーブ走行時のような加減速と操舵の同時制御が必要となるシーンでの運転行動を分析し,操舵操作に連係した加減速行動(前後加速度制御)の制御アルゴリズム(G-Vectoring)を見いだした[図3(a)参照]。
本アルゴリズムに基づいた自動加減速制御により,旋回や加減速に伴い車両に発生する加速度が滑らかに変化し,またカーブ路走行時のドライバー操作負荷を大幅に低減できることを確認している2)。今回,これまでドライバーが行っていた旋回開始/終了といった旋回過渡期の加減速に応じた操舵制御を自動システムで実現することを目的とした。G-Vectoringのモデルとなった熟練ドライバーのカーブ路走行における運転分析をすることで,旋回開始から旋回に至るまでの加速度変化に関する特徴量を見いだした。
図3(b)に熟練ドライバーがカーブ路(最小旋回半径40 mのL字カーブ)を初期速度40 km/h,60 km/hにて走行した際の各走行データを示す。ここでカーブ開始地点を0 m地点としているが,どちらの速度条件でもカーブ開始前(0 m地点よりも手前)から走行軌道の曲率(Curvature)が増加しており,ドライバーがカーブ進入前の直線区間から旋回を開始していることが分かる。また車両旋回時にかかる横加速度Gy(Lateral Acceleration)とその時間微分値である横加速度変化Jy(Lateral Jerk)との関係に着目すると,Gyが小さい領域でJyが最大となる傾向が見える。この結果から,熟練ドライバーは加速度自体が小さいタイミングで加速度変化を大きくし,加速度が大きい領域では加速度変化を抑制するよう旋回操作をしていることが分かる。これにより,加速度が大きい領域(タイヤ負荷が大きい状態)で車両挙動を不安定にしかねない加速度変化を低減し,乗り心地悪化の抑制や旋回安定性の確保,さらには旋回開始の早期に車両を旋回内側に向けることによるカーブ先への視界確保といった,カーブ走行時の安全性と安心感を向上する効果が得られる。
図3|G-Vectoringによる旋回時の加減速概念図(a)と熟練ドライバーによる初期速度V0=40 km/h,60 km/hでのカーブ路走行データ(b) 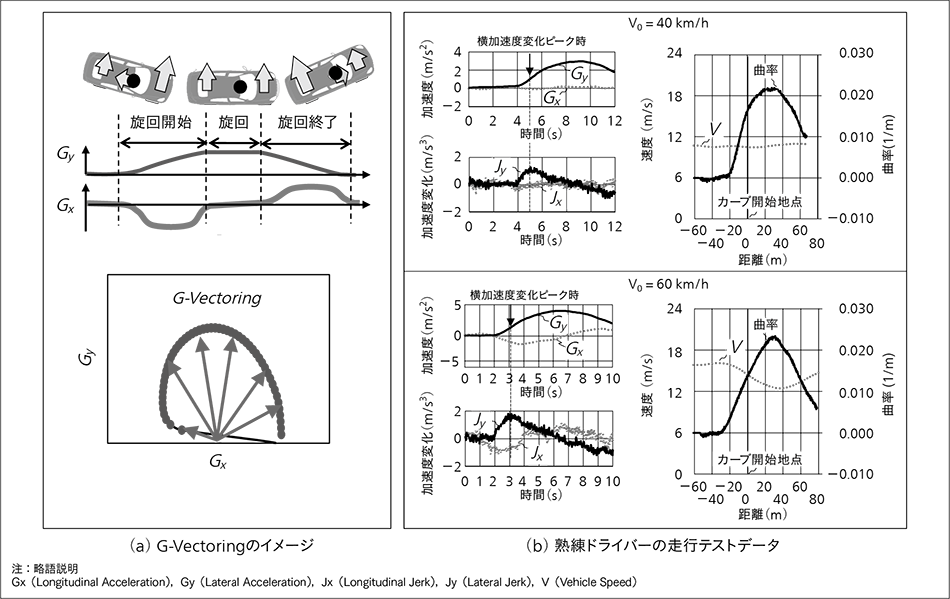 どちらの速度条件でも,旋回開始後の加速度変化において,加速度が小さい領域で加速度の変化が最大となる操作となっている。
どちらの速度条件でも,旋回開始後の加速度変化において,加速度が小さい領域で加速度の変化が最大となる操作となっている。
このようにG-Vectoringのような旋回時の横加速度と加減速の連係に加え,加速度に対する加速度変化の関係を自動走行制御の設計に反映できるような制御アルゴリズムを構築することで,熟練ドライバーのような旋回過渡期の加速度変化を可能とする自動走行が実現できる3)。
4. 高速道路の車線変更における乗り心地制御
自動運転におけるユーザー提供価値を向上させるうえでは,安全性および快適性に加え,移動時間の短縮が重要である。しかし,法規や周囲環境を考慮したうえでできるだけ高い車速を維持するためには,旋回速度を高くする必要があり快適性が損なわれてしまう。そこで,快適な走行領域を広げるため,高速旋回時に不快と感じる要素の指標化を行い高G(Gravitational Acceleration)領域での乗り心地改善について取り組んでいる。その第1段階として,自動運転の普及が始まっている高速道路において,低速車両の追い越しや回避時の隣接車線への移動をターゲットとした不快度の指標化を実施した。
不快度の指標化にあたり,車線移動時間,シャシー系デバイスの特性を変えた試験にて,官能評価により不快度を評価するテストを実施した。被験者が申告した不快度に対する評点と乗員・車両挙動の関係を調査するため,シート上の乗員を倒立振り子モデルとして解析した結果,乗員にかかる力と不快度に対する評点に相関関係を得ることができた。この力を構成する要素は加速度の変化およびロールであるため,乗り心地改善の手段として,加速度の変化を最小化する経路最適化技術,最適経路に対する高精度追従制御技術に加え,ロールを低減するアクティブサスペンションを用いた車両姿勢制御技術を開発している。
これらの技術を用いることで,高G領域でのレーンチェンジにおいて不快度の低減ができるとともに,緊急回避などに応用することで,安全・快適な自動運転を達成できる(図4参照)。
図4|乗員倒立振り子モデルと不快度低減手法 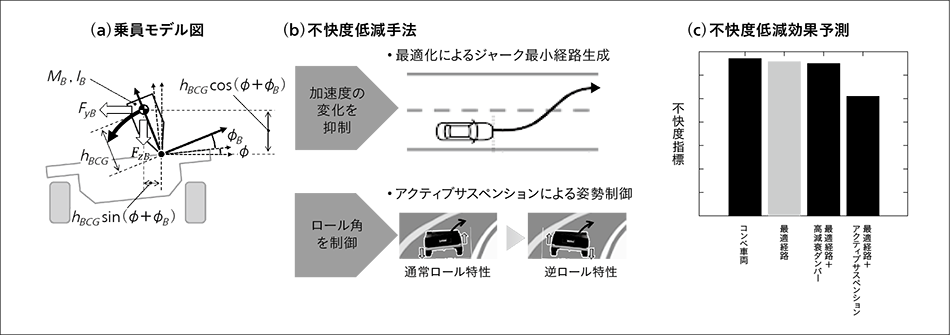 加速度の変化,ロール角のコントロールを行うことで,乗員にかかる力を低減する。
加速度の変化,ロール角のコントロールを行うことで,乗員にかかる力を低減する。
5. 発進/停止時の乗り心地制御
図5|EV(Electric Vehicle)発進/停止の際の振動抑制制御 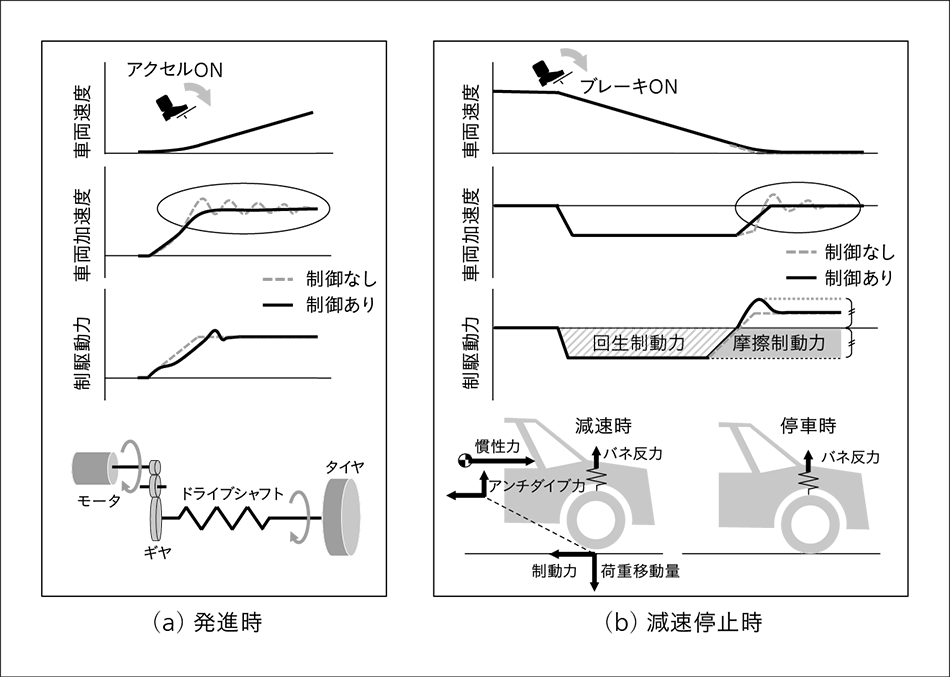 発進/停止いずれの場合でもモータトルクを自動補正することで,車両加速度変動を抑制している。
発進/停止いずれの場合でもモータトルクを自動補正することで,車両加速度変動を抑制している。
EVを駆動する電気モータは,内燃機関と比べて高いトルク応答性・精度を有しているため,滑らかで応答がよく快適な走行が可能とされる。しかしながら,構造的に発進/停止時に振動的になる特性があるため,EVらしい快適な乗車体験を実現するためには,この振動を抑えることが重要である。
発進時の振動はドライブラインの共振が原因である。EVのドライブトレインでは,モータとタイヤの間にバネ要素であるドライブシャフトがあるため,いわゆる二慣性系を構成し共振点を有することになる[図5(a)参照]。そのため,モータトルクの変化が大きいとモータ回転が振動的になり,これが車両に伝達され乗員が振動を感じて快適性が損なわれる。
この課題を解決するために,モデル追従制御をベースとした振動抑制制御を開発している。この方式では,振動を起こさない系を想定したモータ速度を推定し,実際の速度と比較することで振動速度を抽出する。これを抑えるようにモータトルクを補正することで,振動の抑制を実現する。実際には検出した速度に混入する外乱成分の除去が開発の課題となり,外乱の推定やフィルタリングの技術によってこれを解決している。
停止時の振動は,停車の瞬間に減速に伴う荷重移動がなくなった後,残ったサスペンションのバネ反力によって車両が揺らされることが原因である[図5(b)参照]。これはEVに限らず生じる振動であり,ユーザーが停車に合わせてブレーキを緩めて振動を抑えるのが一般的である。しかしながら,いかなる場面でも完璧にブレーキを操作することは難しく,振動を抑えきれないことも多い。
そこで,停車の直前に車両に作用する制動力を弱めるように一時的にモータトルクを上昇させ,バネ反力を十分に小さくして停車させることで停車時の振動を抑える技術を開発している。モータトルクによって相殺する摩擦制動力を精度よく推定する技術がポイントで,センサー情報の融合や学習制御によってこれを解決した。
日立は,長年培ったモータ・インバータ技術を基盤として上述した制御以外にもEVの安全・快適に貢献する技術開発を進めており,EVの普及を通じた持続可能な社会の実現に貢献していく。
6. おわりに
本稿では,自動車における目的地への安全な移動という役割に加えて,移動時間を安心して快適に過ごすという役割を実現するための車両統合制御技術について述べた。安心や快適は運転における余裕を生み,さらに安全な移動にもつながる。電動化が進み自動運転や先進運転支援システムへの期待が高まっている。今後も,車両統合制御技術の強みを生かし,安全・安心・快適性の向上を加速し,さらに環境保全にも寄与する先進的なモビリティソリューションを提供し,持続可能な社会の実現に貢献する。
参考文献など
- 1)
- M. Yamakado et al.: Improvement in vehicle agility and stability by G-Vectoring control, Vehicle System Dynamics, Vol. 48, Issue Sup1, pp. 231-254 (2010.11)
- 2)
- 髙橋絢也,外:G-Vectoringが生み出した車両運動制御技術,自動車技術会シンポジウムテキスト,No. 02~17,pp. 1~6(2017.7)
- 3)
- 髙橋絢也,外:エキスパートドライバ行動に基づく操舵制御モデルの検討,自動車技術会論文集,Vol. 50,No. 1,pp. 102~108(2019.1)
- 4)
- 牧田光弘,外:乗員の快適性を向上させる車両運動の探求,自動車技術会論文集,Vol. 50,No. 5,pp. 1349~1354(2019.9)



