
[ⅲ]快適な交通社会を実現するつながる技術・サービス化安全性と快適性を両立する自動運転向け車載ユニット
執筆者
成沢 文雄Narisawa Fumio
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 システム開発部 所属
浅田 幸則Asada Yukinori
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
祖父江 恒夫Sobue Tsuneo
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 システム開発部 所属
矢野 正Yano Masashi
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 情報通信システム設計部 所属
坂ノ上 修Sakanoue Osamu
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 情報通信システム設計部 所属
前田 功治Maeda Koji
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
斉藤 正史Saito Masashi
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット AD/ADAS本部 AECU設計部 所属
執筆者の詳細を見る
成沢 文雄Narisawa Fumio

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 システム開発部 所属
- 現在,自動運転システムの設計開発に従事
- 博士(工学)
- 自動車技術会会員
- 情報処理学会会員
浅田 幸則Asada Yukinori

- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
- 現在,E/Eアーキテクチャ開発に従事
祖父江 恒夫Sobue Tsuneo

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 システム開発部 所属
- 現在,自動運転システムの設計開発に従事
- 情報処理学会会員
矢野 正Yano Masashi
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 情報通信システム設計部 所属
- 現在,セントラルゲートウェイの開発に従事
- 電子情報通信学会会員
- 情報処理学会会員
坂ノ上 修Sakanoue Osamu

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット システム設計本部 情報通信システム設計部 所属
- 現在,地図ユニットのプロジェクト開発推進に従事
前田 功治Maeda Koji

- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 E/Eアーキテクチャ開発部 所属
- 現在,E/Eアーキテクチャ開発に従事
斉藤 正史Saito Masashi

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット AD/ADAS本部 AECU設計部 所属
- 現在,AD/ADAS系ユニットのハードウェア開発に従事
ハイライト
近年,クルマを取り巻く環境が大きく変化している。自動運転機能や運転支援機能は年々進化しており,通信機能を介して新たな価値を提供するコネクテッドカーの普及も徐々に広がっている。そうした流れの中で,日立グループは,自動運転車両やコネクテッドカーの実現に必要な車載ユニットの開発および製品化に注力している。
本稿では,車両アーキテクチャの核となるセントラルゲートウェイユニット,自動運転制御ユニット,地図ユニットの製品特長について説明する。またクルマのE/Eアーキテクチャに関する今後の展望について述べる。
1. はじめに
近年,交通事故の防止や高齢者の移動支援などの社会課題解決をめざし,自動車メーカーは自動運転車両の開発に取り組んでおり,競争が激化している。自動運転車両が引き起こす事故を未然に防止するためにも,自動運転機能や運転支援機能には高い安全性が求められる。
一方,通信を介して常時データセンターやインフラと接続し,より快適なサービスを提供できるコネクテッドカーも注目されている。クルマの販売後,通信を介してクルマの機能追加や機能更新を行うOTA(Over The Air)ソフトウェア更新サービスなどが提供され始めている。
日立グループは,多様な製品分野で培った情報通信技術と自動車システム技術を融合し,安全性と快適性を両立するさまざまなセンターサービスと車載ユニットを開発している1),2),3)。本稿では特に自動運転車両やコネクテッドカーの実現を支える日立グループの車載ユニットを紹介する。
2. 車両システム概要
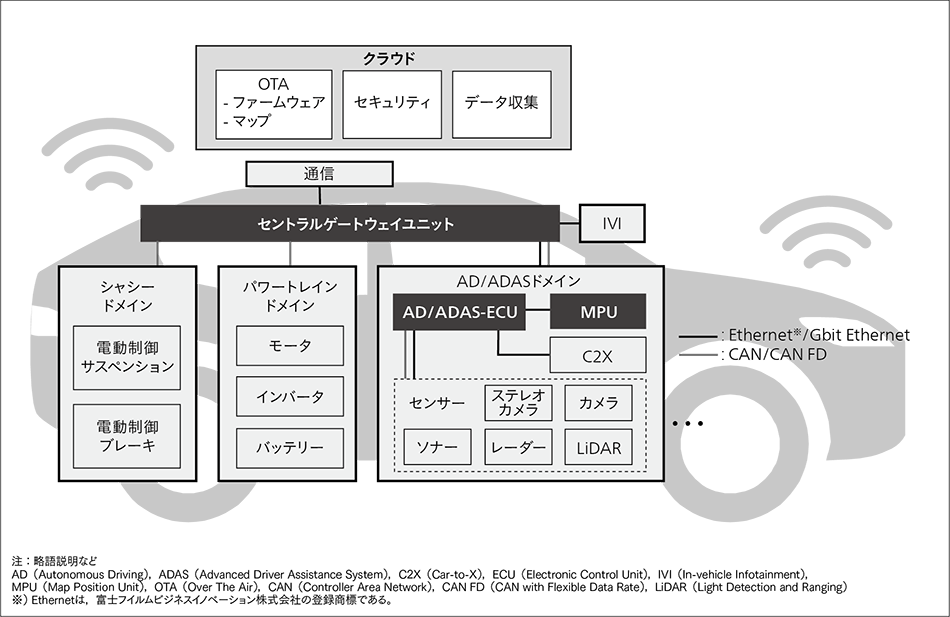
車両システムのアーキテクチャを図1に示す。本アーキテクチャはドメインアーキテクチャと呼ばれており,シャシードメイン,パワートレインドメイン,AD/ADAS(Autonomous Driving/Advanced Driver Assistance System)ドメインといったドメインと呼ばれる機能単位に複数ECU(Electronic Control Unit)を束ね,ドメインコントローラがECU間の連携を制御する構成となっている。ドメイン間はセントラルゲートウェイユニットを介して接続されており,ドメイン間の通信制御や不正アクセス監視などが行われる。
ドメインコントローラである自動運転制御ユニット(AD/ADAS-ECU)は,ステレオカメラやレーダーなどのセンサーで取得した膨大な周囲環境情報に基づいて車両を統合制御する。自動運転や高度な運転支援機能の実現には,多様なセンサーに加えて,数百メートルから数キロ先の道路形状を含めた地図情報を提供する地図ユニット(MPU:Map Position Unit)も必要である。地図情報は,最新に保つために定期的に更新しなければならない。
セントラルゲートウェイユニットを介してセンターと接続することで,ソフトウェア更新や地図更新などのさまざまなセンターサービスとの連携が可能となる。安全なセンターサービスとの連携を実現するためには,セントラルゲートウェイユニットでのサイバーセキュリティ対策が重要となる。
次章以降では,車両アーキテクチャの核となるセントラルゲートウェイユニット,自動運転制御ユニット,地図ユニットについて,その詳細を紹介する。日立グループは,これらの車載ユニットをいち早く製品化し,さまざまな自動車メーカーに提供してきた1),2),3)。
図1|車両システムアーキテクチャ ドメインと呼ばれる機能単位に複数ECUを束ね,ドメインコントローラがECU間の連携を制御するドメインアーキテクチャを示す。セントラルゲートウェイユニットを介してセンターと接続することで,センターサービスとの連携も可能である。
3. セントラルゲートウェイユニット
図2|セントラルゲートウェイユニット  車両通信データの転送機能と情報セキュリティ機能,および無線を利用して制御ソフトウェアを更新するOTAソフトウェア更新機能を提供する。
車両通信データの転送機能と情報セキュリティ機能,および無線を利用して制御ソフトウェアを更新するOTAソフトウェア更新機能を提供する。
車両通信データの転送機能と情報セキュリティ機能,および無線を利用して制御ソフトウェアを更新するOTAソフトウェア更新機能を備えたセントラルゲートウェイユニットを開発した(図2参照)。
クルマのエレクトロニクス化や自動運転化に伴い,飛躍的に車載ネットワーク上の通信量が増大している。これに対応するためにセントラルゲートウェイユニットは,代表的な車載ネットワークであるCAN(Controller Area Network)の多チャンネル化に加えて,より広帯域な通信が可能な車載Ethernetを搭載している。また,車両内外の脅威から車両を守るため,(1)不正な通信のフィルタリング,(2)不正なソフトウェア書き換えを検知するセキュアブート,(3)DoS(Denial of Service)攻撃などの不正アクセスを検知するバス負荷監視機能などを搭載し,車両外部からの攻撃が内部ネットワークに侵入することを防止している。
日立グループは,Lumadaの「無線を活用した自動車ソフトウェア更新ソリューション」として,車両構成に基づいた更新データの配信を行うデータセンター(以下,「OTAセンター」と記す。)から車載ユニットまでワンストップで提供している(図3参照)。
セントラルゲートウェイユニットは,OTAセンターからの更新データ受信や車両制御ソフトウェアの更新制御を行う。更新異常時のリカバリー技術によって安全なソフトウェア更新を実現するだけでなく,走行中に更新データを事前ダウンロードすることで更新処理時間を短縮し,ユーザーが車を利用できない時間を短くする工夫もしている。また,更新データの暗号化と署名検証を行うことで,更新データの漏洩や不正ソフトウェアへの書き換えなどのセキュリティリスクを低減し,高信頼なソフトウェア更新を可能としている。
今後は,車両のアーキテクチャ変遷を踏まえ,より高性能なマイコンを搭載し,通信・セキュリティ以外の車両制御機能などを集約した統合ECU(Integrated ECU)への進化をめざす。
図3|無線を活用した自動車ソフトウェア更新ソリューション 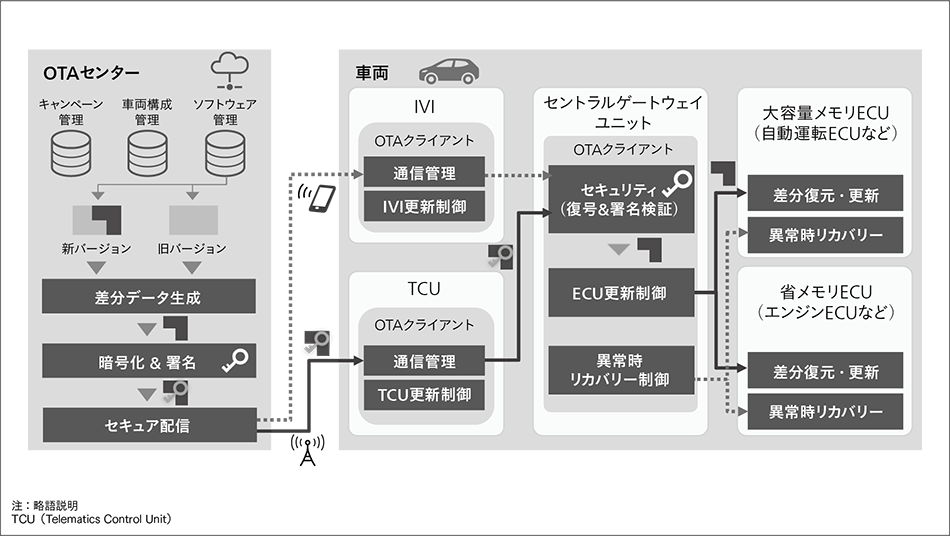 更新ソフトウェアの送信を行うOTAセンターから車載ユニットまでワンストップで提供する。
更新ソフトウェアの送信を行うOTAセンターから車載ユニットまでワンストップで提供する。
4. 自動運転制御ユニット
図4|自動運転制御ユニット 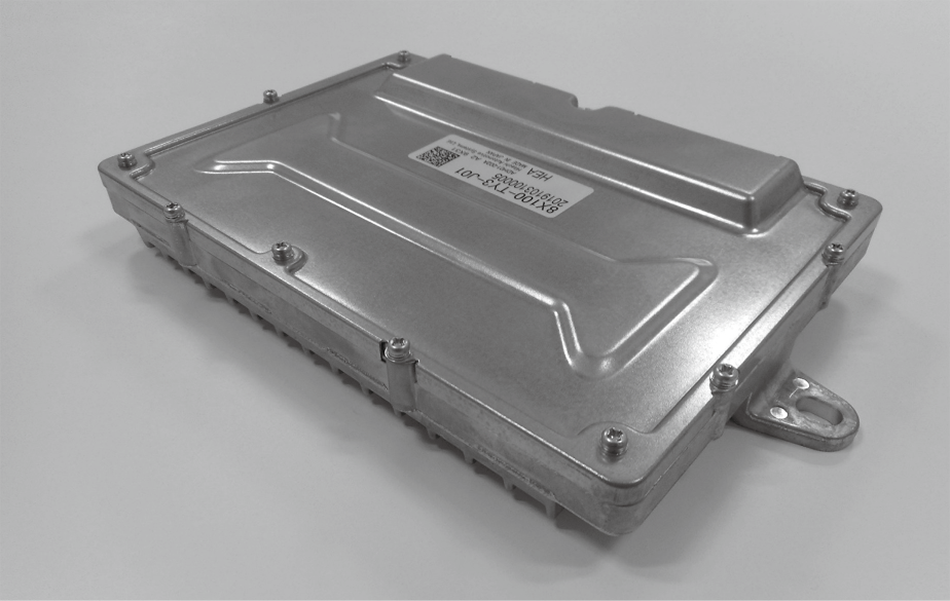 認識処理用と車両制御用に二つのCPU(Central Processing Unit)を搭載することで,安全性と高速演算性能を両立した。
認識処理用と車両制御用に二つのCPU(Central Processing Unit)を搭載することで,安全性と高速演算性能を両立した。
車両の統合制御は,ステレオカメラなどのセンサーで自車周辺を認識し,複数センサー情報をフュージョンして周辺の車両や標識などを認知し,認知結果に基づいて車両の軌道計画策定および軌道追従制御を行うことで実現される。
自動運転の高度化に伴ってセンサーの数や種類は大幅に増加しており,それら膨大なセンサー情報を伝達するための高速通信が必要となってきている。また,膨大なセンサー情報に基づいた認知処理を実現するためには高速演算性能も必要となる。さらに,安全な自動運転を実現するためには,制御周期を守って確実にアクチュエータへの制御指示を行わなければならない。自動運転制御ユニットは,これら複数の要件を満たさなければならない。
日立グループは,衝突被害軽減ブレーキなどの運転支援機能を備えたADAS-ECUを2009年に製品化して以降,多くの車種に搭載して量産実績を積み重ねてきた。ADAS-ECUで培った技術をベースに開発した自動運転制御ユニットは,認識処理用と車両制御用に二つのCPU(Central Processing Unit)を搭載することで,機能安全ASIL-Dに準拠した安全性と高速演算性能を両立し,高精度な車両統合制御の実現を支えている(図4参照)。また,CANに加えてEthernetも搭載することで高速通信を可能にしている。さらに,車両制御ソフトウェア更新にも対応しており,日立グループで提供するOTAセンターを介した無線通信による更新が可能である。
今後は,自動運転の高度化に向けて,さらなる高性能化および高機能化をめざす。
5. 地図ユニット
図5|地図ユニット  地図情報を内蔵し,GNSS(Global Navigation Satellite System)とジャイロや加速度センサーの情報を使った高精度位置推定技術によって車線レベルの自車位置を出力することが可能である。
地図情報を内蔵し,GNSS(Global Navigation Satellite System)とジャイロや加速度センサーの情報を使った高精度位置推定技術によって車線レベルの自車位置を出力することが可能である。
例えば,先行車両の追い越し支援やカーナビゲーションの経路に沿った自動走行など,高度な車両統合制御を行うためには,自車がどの場所を走行しているかを車線レベルで正確に把握するとともに,自車前方の道路形状情報が必要となる。これを実現するためには,車線レベルで測量された高精度地図情報と,自車位置を車線レベルで特定する機能が必要となる。自車位置の特定は通常GPS(Global Positioning System)などの衛星測位システム(GNSS:Global Navigation Satellite System)が使われるが,GNSSで得られる自車位置には通常数メートルほどの誤差がある。さらに都市部や山間部などのGNSS電波受信状況が悪い場所では,自車位置が不安定となりやすいため,GNSSだけで車線レベルの自車位置を把握することは難しい。
これらの課題を解決するためには,GNSSと各種センサーデータを使ったセンサーフュージョンによる自車位置推定精度の向上や,地図情報に含まれる各種の位置情報を活用することが必要となる。日立グループの地図ユニットは,内蔵した高精度地図情報と,GNSSとジャイロや加速度センサーを使用した高精度位置推定技術により,ナビゲーションシステムから受信した経路情報を車線レベルの経路情報に変換し,目的地までの車線レベルの推奨経路情報を車両統合制御に提供することで,高度な運転制御を実現する(図5参照)。また,高精度地図情報は常に最新の状態を保つことが求められるため,OTAによる自動更新を提供してユーザーの利便性を高めている。
今後は,さらなる自車位置推定精度の向上を図るとともに,地図ユニットは車線レベルの高精度地図情報だけでなく,カーナビゲーションに利用されている道路レベルの地図情報も搭載することが可能なため,この地図を利用して前方カーブの曲率情報や制限速度情報を車両統合制御に提供することで,カーブ前自動減速などの運転支援の実現をめざす。
6. E/Eアーキテクチャの展望
自動運転機能や運転支援機能をはじめとして,クルマには新しい機能が追加され続け,ECUは100を超えるほどになった。ECU数の増加とともに電源線や通信線といったワイヤーハーネスも増加し,重量や配索コストが課題となってきた。そのため,現在の車両アーキテクチャは,ドメインごとに機能を集約・統合し,ECUやワイヤーハーネス数を削減するドメインアーキテクチャが主流となっている(図1参照)。
次世代のアーキテクチャでは,さらにドメイン間の統合を進めたゾーンアーキテクチャが主流になると考えている(図6参照)。
ゾーンアーキテクチャは,ドメインをまたがるソフトウェアが統合実装された統合ECUと,車両の前後や左右といった場所ごとでドメインに依存せず情報収集を行うゾーンECUで構成される。このようなドメインをまたがるECU統合により,従来のドメインアーキテクチャと比較して25%~50%程度までE/E(Electric/Electronic)アーキテクチャのコストを低減できる見込みである。
ゾーンECUで収集される情報は各ドメイン情報の合計となるため,従来のアーキテクチャに比べて広帯域で,時間制御されたEthernetバックボーンネットワークが必要となり,また統合ECUには異なる安全度の多数のソフトウェアを統合実装するといった新たな課題を解決する必要がある。しかし一方で,ゾーンアーキテクチャでは,異なるドメイン間での情報集約・統合制御が可能となるため,個別ドメインのみでの制御では困難だった新しい車両運動制御や,複合情報を用いた車両診断,OTAによる効率的なソフトウェア更新を実現できるメリットもある。
図6|ゾーンアーキテクチャ 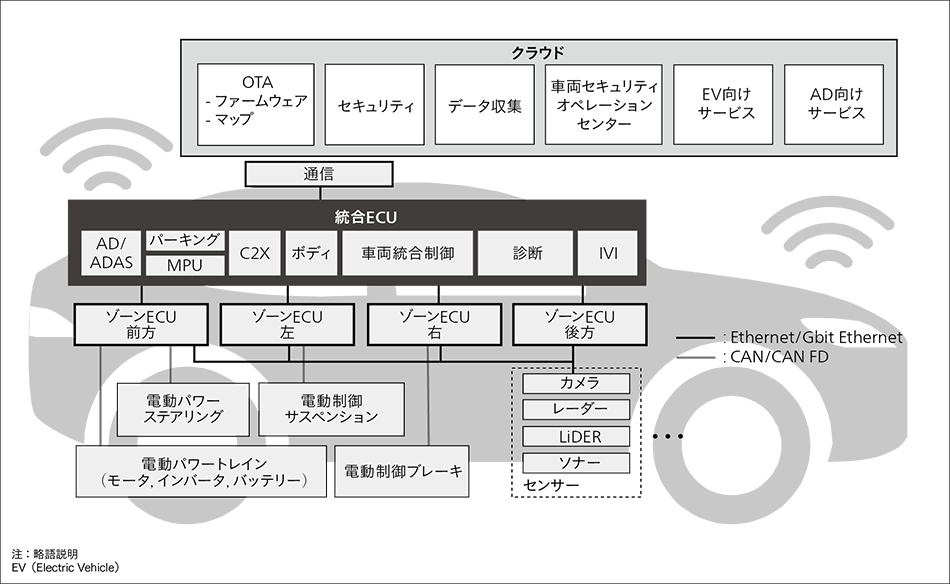 ドメインをまたがるソフトウェアが統合実装された統合ECUと,車両の前後や左右といった場所ごとに情報収集を行うゾーン ECUとで構成され,新しい車両運動制御や複合情報を用いた車両診断,OTAによる効率的なソフトウェア更新を実現できる。
ドメインをまたがるソフトウェアが統合実装された統合ECUと,車両の前後や左右といった場所ごとに情報収集を行うゾーン ECUとで構成され,新しい車両運動制御や複合情報を用いた車両診断,OTAによる効率的なソフトウェア更新を実現できる。
7. おわりに
本稿では,自動運転車両やコネクテッドカーの実現を支える車載ユニットの製品特長,およびE/Eアーキテクチャの展望について述べた。今後も日立グループでは,IT・OT(Operational Technology)の世界で培った情報制御・実装技術と車載ユニットに関する膨大な知見を駆使し,新時代のクルマづくりに貢献していく。



