
先進計測技術開発と福島第一原子力発電所廃炉作業への適用
執筆者
岡田 聡Okada Satoshi
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
小林 亮介Kobayashi Ryosuke
- 日立製作所 研究開発グループ 脱炭素エネルギーイノベーションセンタ 所属
- 現在,福島第一原子力発電所廃止措置向けの燃料デブリ取り出し技術の研究開発に従事
上野 克宜Ueno Katsunori
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
執筆者の詳細を見る
岡田 聡Okada Satoshi

- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島第一原子力発電所廃止措置向けの燃料デブリ取り出し技術,調査技術の開発に従事
- 博士(情報科学)
- 日本ロボット学会会員
- 日本機械学会会員
- 電気学会会員
- 日本原子力学会会員
小林 亮介Kobayashi Ryosuke

- 日立製作所 研究開発グループ 脱炭素エネルギーイノベーションセンタ 所属
- 現在,福島第一原子力発電所廃止措置向けの燃料デブリ取り出し技術の研究開発に従事
- 日本ロボット学会会員
- 日本原子力学会会員
- 日本船舶海洋工学会会員
上野 克宜Ueno Katsunori

- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島第一原子力発電所廃止措置向けの燃料デブリ取り出し技術の設計開発に従事
- 博士(工学)
- 日本原子力学会会員
- 応用物理学会会員
- 日本医学物理学会会員
ハイライト
福島第一原子力発電所(1F)の廃止措置では,高い放射線環境下において遠隔操作により作業を行うロボットが不可欠である。これに対し,日立グループはがれき撤去,除染などの作業,水中および気中の目視調査,超音波調査,放射線調査などの各種調査を行うロボットを開発し,1Fに適用している。これらのロボットには,調査作業に用いる計測技術の実装が必要である。
本稿では,ロボットの自己位置推定や姿勢推定技術,放射線計測技術,さらには超音波センシング技術など,1F向けに開発してきた先端計測技術を紹介する。
1. はじめに
福島第一原子力発電所(以下,「1F」と記す。)の廃止措置では,がれき撤去,除染などの重作業,水中および気中の目視調査,超音波調査,放射線調査といった作業を高い放射線環境下で行わなければならない。これに対し,日立グループは遠隔操作で作業を行うことのできる各種調査作業向けのロボットを開発し,1Fに適用してきた1)。これらのロボットには,重作業を実現するためのエンドエフェクタ,ロボットを制御するための状態センシング技術などのほか,調査作業に用いる計測技術の実装が必要である。
本稿では,これらのロボットに必要な高放射線環境下で動作する自己位置推定や姿勢推定技術,光ファイバー型ガンマ線線量率計や中性子計測などの放射線計測技術,さらに燃料デブリを含む地下の状態を可視化するための超音波センシング技術など,1F向けに開発してきた先端計測技術について解説する。
2. 高放射線環境での遠隔作業支援技術
2.1 ロボット位置推定
遠隔でロボットを動作させるには,ロボットの現在位置を把握して操作に反映する必要がある。また,調査に用いるロボットでは,搭載した放射線検出器,水中カメラなどの計測器のデータを,ロボットの位置と関連づけて記録する。そのため,ロボットの正確な位置を求める必要があるが,例えば1FのPCV(Primary Containment Vessel:原子炉格納容器)内部を調査する場合,狭隘領域を通過する必要があるためロボットの大きさは制限され,位置推定のための測定器を追加で搭載することは難しい。
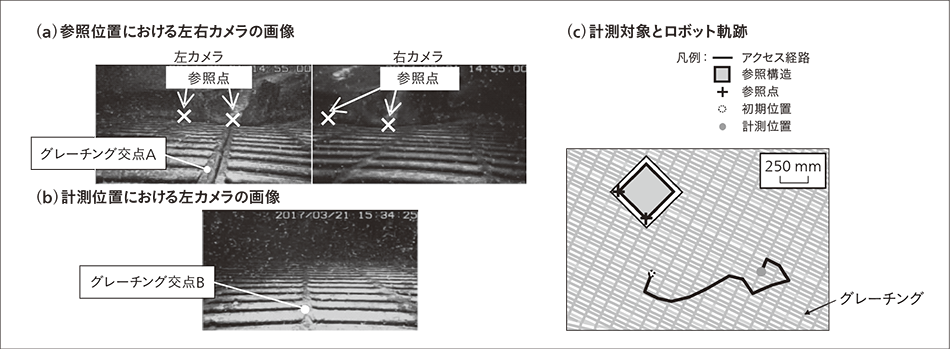
そこで,既に搭載された2台のカメラを用いたロボット位置推定手法を開発した。本手法は,ステレオカメラにより配置が既知である構造物からの相対位置姿勢を算出してロボットの初期位置を求め,そこからの相対位置変化量を繰り返し構造追跡することで現在位置を推定する。開発した位置推定手法は,2017年3月に実施した1Fの1号機格納容器内部調査2)に適用した(図1参照)。
図1|1Fの1号機格納容器内部調査に適用した位置推定手法ロボットに搭載された2台のカメラを用い,ステレオカメラ手法により配置が既知である構造物からの相対位置姿勢を算出してロボット初期位置を求め,初期位置からの相対位置変化量を繰り返し構造追跡する手法で算出する。
2.2 ロボット姿勢推定
図2|遠隔操作支援システムの構成例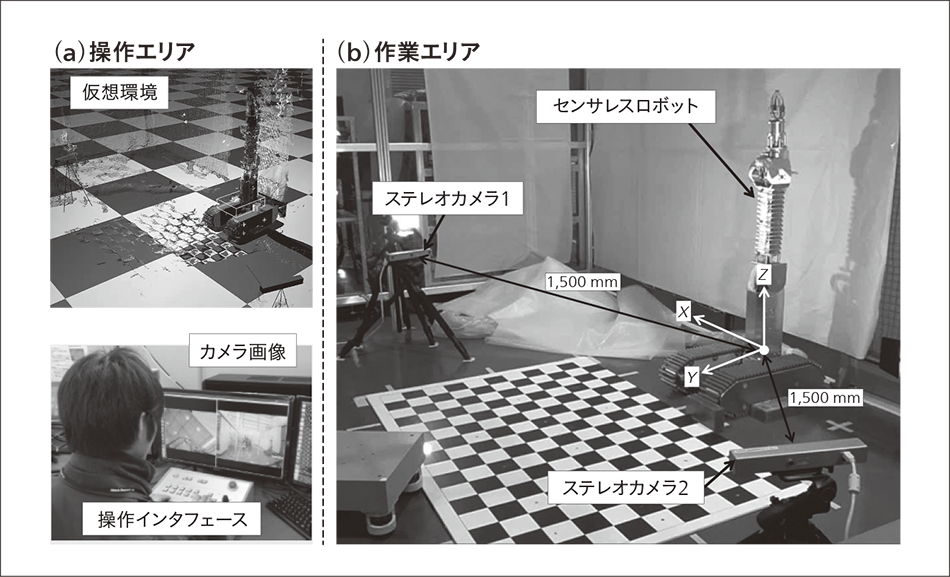 作業エリアには,搭載センサーがない(センサレス)ロボットとステレオカメラを設置し,操作エリアの制御装置内でステレオカメラ画像を基にロボットの状態を推定する。
作業エリアには,搭載センサーがない(センサレス)ロボットとステレオカメラを設置し,操作エリアの制御装置内でステレオカメラ画像を基にロボットの状態を推定する。
遠隔で作業を行うロボットの制御においては,前述の位置推定のほか,手先やアームなどの姿勢を把握し,操作に反映させる必要がある。ただし,1Fでの作業に用いるロボットは,作業エリアから離れた放射線量が低いエリアでオペレータが制御する必要があり,直接ロボットを目視せずに操作することになる。そのため,リアルタイムでロボットの操作・監視を支援するシステムが求められる。しかしながら,高放射線環境では,耐放射線性の問題があり,ロボット自体に姿勢計測センサーを搭載して監視する一般的な構成が適用できない。
そこで,ロボット本体からセンサーを外し,外部へ設置したセンサーからの情報を利用してロボットを操作・監視する遠隔操作システムを開発した3)。
開発した遠隔操作支援システムの構成例を図2に示す。作業エリアには,搭載センサーがない(センサレス)ロボットとステレオカメラを設置し,操作エリアの制御装置内でステレオカメラ画像を基にロボットの状態を推定する。その結果を仮想環境上でオペレータへ提示することで,カメラ画像のみでは把握できない作業環境の三次元形状や配置の確認ができ,作業対象物へのアクセスや周辺構造物との干渉回避の操作支援を実現した。
2.3 超音波による水中環境可視化
図3|超音波水中可視化の原理と可視化結果の一例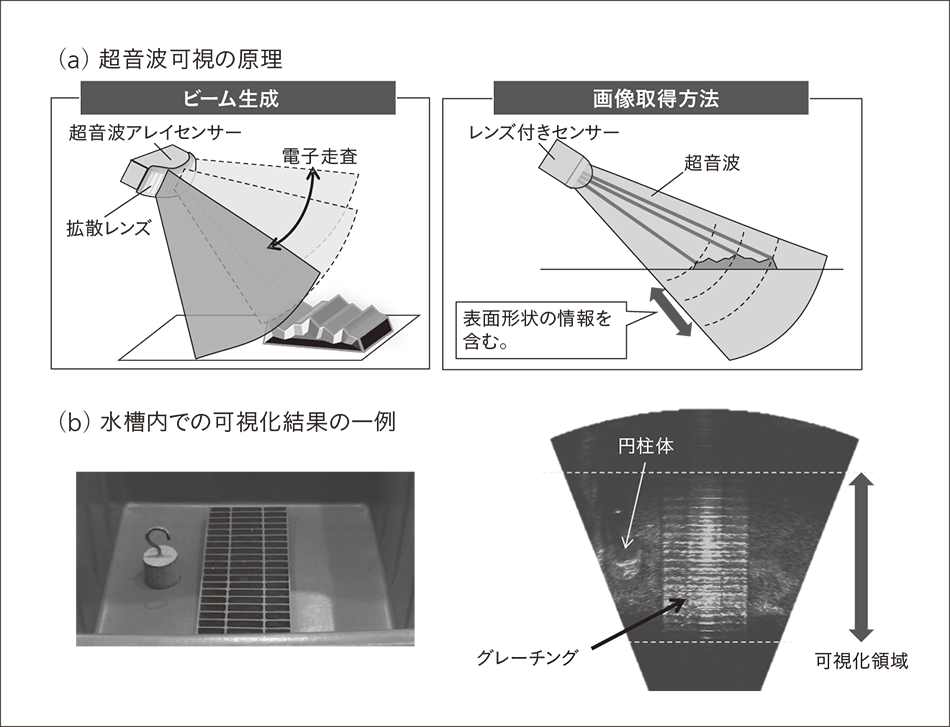 複数の振動子から構成した超音波アレイセンサーへ拡散レンズを装着し,左右方向へは電子的に遅延時間を設定して超音波ビームを走査,上下方向には拡散レンズでビーム幅を拡大することで,画像化範囲を拡大する。
複数の振動子から構成した超音波アレイセンサーへ拡散レンズを装着し,左右方向へは電子的に遅延時間を設定して超音波ビームを走査,上下方向には拡散レンズでビーム幅を拡大することで,画像化範囲を拡大する。
滞留水中の調査や作業では,光学カメラでは視認できない濁水環境となることが予想される。そのため,環境調査や作業中の対象物確認・監視を目的として,超音波を用いた水中環境可視化技術を開発した。
超音波は可視光と比較して水中での透過性が高いが,広範囲の画像をリアルタイムに取得することが難しいという点で課題があった。この課題に対し,原子力プラントの非破壊検査で開発したフェーズドアレイ技術を応用した。
超音波可視の原理を図3(a)に,可視化結果の一例を同図(b)にそれぞれ示す。複数の振動子から構成した超音波アレイセンサーへ拡散レンズを装着し,左右方向へは電子的に遅延時間を設定して超音波ビームを走査,上下方向には拡散レンズでビーム幅を拡大することで,画像化範囲を拡大した。水槽内での性能評価試験の結果,約20 mmの分解能で対象物(グレーチングの格子幅)を視認できることを確認した。
3. 燃料デブリや堆積物を調査する計測技術
3.1 光ファイバー型ガンマ線線量率計
図4|PMORPHに搭載した小型放射線量率計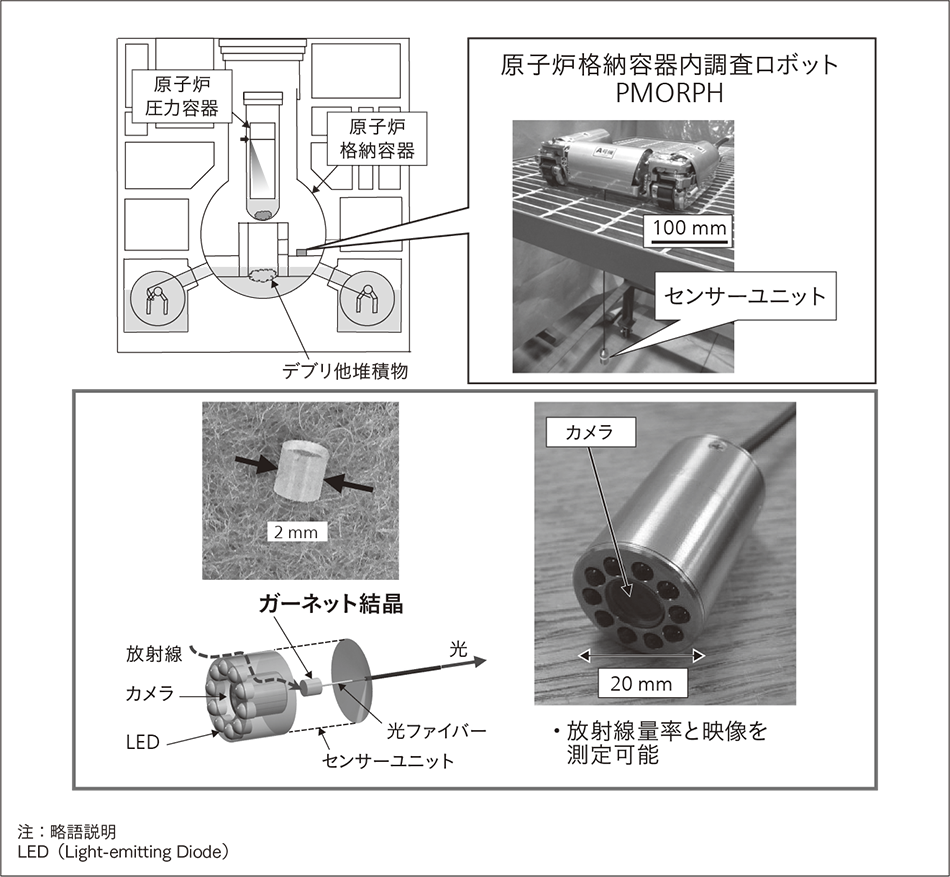 センサーユニットに搭載した直径2 mmのガーネット結晶の発光を検知することで,従来のシリコン半導体方式と比べて1万倍の放射線耐性を実現した。
センサーユニットに搭載した直径2 mmのガーネット結晶の発光を検知することで,従来のシリコン半導体方式と比べて1万倍の放射線耐性を実現した。
原子炉直下で燃料デブリを調査するには,高放射線・狭隘環境下でも長時間安定して遠隔で動作できる放射線検出器が必要となる。そこで,原子炉格納容器内調査用ロボットPMORPH4)に搭載可能で,放射線照射により発光する結晶と光ファイバーを備えた小型のガンマ線線量率計を開発した。
PMORPHに搭載した小型放射線量率計を図4に示す。センサーユニットに搭載した直径2 mmのガーネット結晶の発光を検知することで,従来のシリコン半導体方式と比べて1万倍の放射線耐性を実現した。2017年3月に本線量率計を1Fの1号機原子炉格納容器内調査に適用し,放射線量率と映像の取得に成功した5)。この線量率計は次の調査で利用する装置へ搭載される計画であり,引き続き原子炉内の詳細状況の把握に貢献していく。
3.2 水中環境調査技術
過去の調査(2017年3月)により1Fの1号機原子炉格納容器の地下階には堆積物が存在していることが分かっている。今後の燃料デブリ取り出しに向けては,堆積物を含む地下階の詳細な状況の確認が必要である。地下階は水中環境であることから,各種計測器を搭載し,水中を遊泳可能な調査装置(ROV:Remotely Operated Vehicle)を用いた詳細状況の情報取得が計画されている。
ROVに搭載した各種計測器を図5に示す6)。以下のROVを用いて,2022年に1Fの1号機原子炉格納容器内堆積物調査に適用する計画である。
- 超音波による水中調査
ROV-Bは走査型超音波距離計と水温計を搭載し,ペデスタル外の広範囲にわたる堆積物表面の点群データを取得し,三次元の高さ分布を捉える装置である。ROVの中央底面に取り付けたアンカーにより姿勢を安定化し,約2 MHzの超音波距離計を,機械的チルト機構による±50°のメカ走査と,チルト方向と直交する方向に±50°の電子走査を組み合わせて二次元走査をすることで,三次元の形状計測を実現するものである。
また,ROV-Cは,約100 kHzの高出力超音波センサーを用いて,ペデスタル外の堆積物の厚さと堆積物下の床面や燃料デブリ(塊や比重の大きい粉末層)の高さの測定を行うものである。ここで,堆積物などの深層部分まで調査を可能とするため,超音波センサーには通常の数倍の電圧を印加する。ROV-Bと異なり,ROV-Cは真下方向の調査をすることとし,ROVを移動させて水平方向の厚さ分布を推定する。 - 燃料デブリ特有の放射線を調査する放射線計測技術
ROV-Dは,燃料デブリ特有の放射線を調査する装置である。ROV-Dへ搭載するために,10 Gy/hを超える放射線環境下であっても核種分析が可能でガンマ線計測と中性子束計測も同時に実現可能な放射線計測技術を開発した。高放射線環境かつROV起因電気ノイズ下で放射線センサーの微小電荷を検知するデジタル信号処理手法を備えることで,従来の放射線計測技術と比べて約200倍の放射線耐性を実現した。
図5|水中ROVに搭載した各種計測器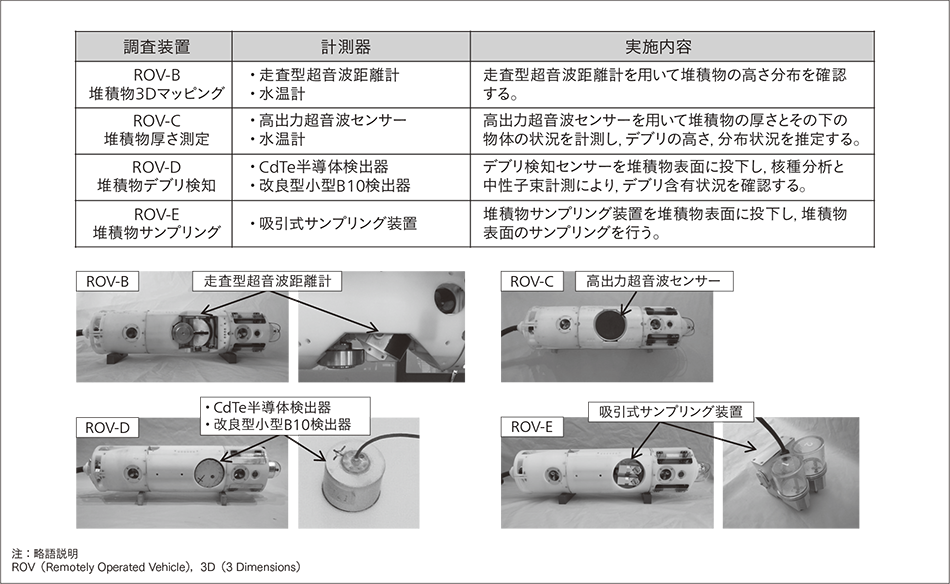 水中を遊泳可能な調査装置(ROV)に各種計測器を搭載し,地下堆積物に関する情報を取得する。超音波を用いた堆積物3Dマッピング,堆積物厚さ測定,堆積物デブリ検知,堆積物サンプリングを実施可能である。
水中を遊泳可能な調査装置(ROV)に各種計測器を搭載し,地下堆積物に関する情報を取得する。超音波を用いた堆積物3Dマッピング,堆積物厚さ測定,堆積物デブリ検知,堆積物サンプリングを実施可能である。
4. おわりに
本稿では,1Fの廃止措置に向け,日立が開発・適用した高放射線環境下で動作するロボットの自己位置推定や姿勢推定技術,光ファイバー型ガンマ線線量率計や中性子計測などの放射線計測技術,さらに燃料デブリを含む地下の状態を可視化するための超音波センシング技術などの先端計測技術について解説した。
これらの技術は,調査,環境整備,燃料デブリ取り出しなどの作業に活用することができる。今後も,長期にわたる廃止措置事業を進めるため,技術開発を進めていく。
謝辞
本稿で述べた装置は,日立グループのロボット技術,計測技術を活用し開発したものである。そのうち,ロボット位置推定技術,小型放射線量率計,燃料デブリ特有の放射線を調査する放射線計測技術は,資源エネルギー庁の補助事業である平成25年度発電用原子炉等廃炉・安全技術開発費補助金,平成25~30年度補正予算「廃炉・汚染水対策事業費補助金」などにより,技術研究組合国際廃炉研究開発機構の事業として開発したものである。
参考文献など
- 1)
- 岡田聡,外:福島第一原子力発電所の廃炉に向けたロボット技術開発と実機適用,日立評論,102,2,270~275(2020.3)
- 2)
- 東京電力ホールディングス株式会社,1号機原子炉格納容器内部調査について(2017.3)(PDF形式、2.9Mバイト)
- 3)
- Hitachi-GE Nuclear Energy, Ltd. et al.: Manipulator Pose Estimation System Using Stereo Camera for Decommissioning Work, E-Journal of Advanced Maintenance, vol. 11, No. 1, NT93(2019.5)
- 4)
- 岡田聡,外:原子炉格納容器内部調査装置の開発:形状変化型ロボット「PMORPH(ピーモルフ)」,電気評論,Vol. 641,No. 102(夏季増刊号),pp. 27~31(2017.6)
- 5)
- 上野克宜,外:高放射線・狭隘環境での線量率分布の遠隔測定を可能とする光ファイバ型線量率計測技術,日本原子力学会誌ATOMOΣ,Vol. 62,No. 12,pp. 717~721(2020.12)
- 6)
- 技術研究組合国際廃炉研究開発機構,外,1号機 PCV内部調査に向けた準備作業状況について(2021.10)(PDF形式、4.5Mバイト)



