
GNSSを用いた運転実績の可視化と評価阪急宝塚線における運行省エネルギー化の見積もり
ハイライト
環境問題への対応やCOVID-19の影響による収入減に対応するため,鉄道業界では省エネルギー化の取り組みが進んでいる。
本稿では,列車運行中の走行速度パターンの最適化を通じた省エネルギー化の可能性と効果について,阪急電鉄株式会社の宝塚線におけるGNSSデータを用いた検証のプロセスと結果を紹介する。
1. はじめに
鉄道事業者においては,環境問題対応やCOVID-19の影響による収入減に対応するため,省エネルギーの取り組みが活発化している。近年では,車体や駆動装置の改良による従来の取り組みに加えて,運転中の走行速度パターンの最適化による取り組みも広がっている。これは,省エネルギーな走行速度パターンで運行することにより,運転方法に起因する消費電力量のばらつきを低減し,全体として大きな省エネルギー効果が得られるためである1)。
図1|運転実績振り返りのコンセプト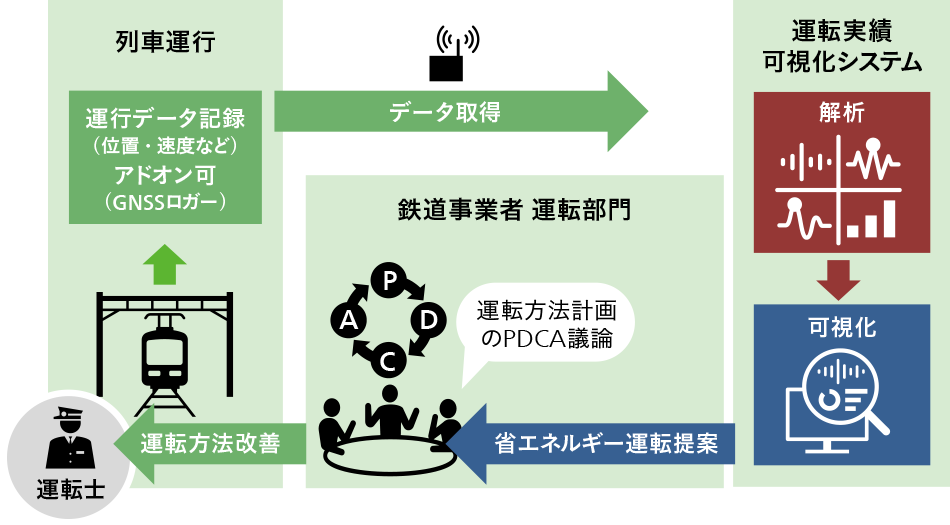 注:略語説明 GNSS(Global Navigation Satellite System),PDCA(Plan, Do, Check, Act)列車から取得する運行データ記録の解析・可視化に基づき,鉄道事業者運転部門へ省エネルギー運転の提案を行う。これを運転方法計画のPDCA議論に活用することで,運転の現場における運転方法の改善に寄与する。
注:略語説明 GNSS(Global Navigation Satellite System),PDCA(Plan, Do, Check, Act)列車から取得する運行データ記録の解析・可視化に基づき,鉄道事業者運転部門へ省エネルギー運転の提案を行う。これを運転方法計画のPDCA議論に活用することで,運転の現場における運転方法の改善に寄与する。
走行速度パターンのばらつき低減に寄与する施策としては,ATO(Automatic Train Operation:自動列車運転)装置やDAS(Driver Advisory System:運転支援システム)の導入が有効である。ただし,これらの装置やシステムの導入には地上・車上の装置改修が必要であり,導入時のコスト面で課題が存在する。これに対し,比較的低コストで取り組むことができる施策として,先行研究2)で提案されている,運転実績の振り返りに基づいた乗務員教育が挙げられる。本施策のコンセプトを図 1に示す。この乗務員教育は,運行中の走行速度パターンを装置に蓄積し,乗務員が空き時間などに,走行速度パターンの可視化結果を走行時分や消費電力量と合わせて振り返ることで,自身の運転操作の改善に役立てる仕組みである。また,乗務員を管理する管理者が,路線内における走行速度パターンの傾向分析を行い,その結果に基づいて乗務員の指導に活用することもできる。
本施策の実現には,運行データとして少なくとも車両位置と車両速度が必要である。高精度な車両位置と車両速度を取得する方法として,これらの情報を管理しているモニタ装置から取得する方法が挙げられる。しかしながらこの方法は,多くのデータを効率的に収集するためにモニタ装置の改修が必要となるため,導入へのハードルが高く,また,そもそもモニタ装置が搭載されていない車両には適用できないという課題がある。
モニタ装置と接続することなくこの施策を実現する方法として,GNSS(Global Navigation Satellite System:全地球航法衛星システム)の活用が挙げられる。すなわち,GNSSの受信機能を備えた装置を車両に設置して,当該受信機能で取得した緯度と経度の情報から車両位置を算出し,同じく当該受信機能から取得できる車両速度情報を活用する方法である。近年はGNSS受信機能がスマートフォンやタブレットといった汎用の端末に標準搭載されているため,これらを用いて位置や速度の情報を容易に収集することが可能である。GNSSを用いた方法では,受信した車両位置と車両速度から駅間の走行速度パターンを再現する。また,駅の発着時刻から走行時分を,速度データから消費電力量を推定する手法も既に提案されている3)。
タブレット端末で取得するGNSSデータを用いた運転実績可視化の先行研究4)では,東日本旅客鉄道株式会社の山手線における試行結果が報告されている。ここでは,山手線1周分のGNSSデータ取得結果を用いて,モニタ装置データとの比較がなされている。この先行研究によれば,位置情報が高精度に取得できる区間では走行速度パターンが精度よく再現でき,運転振り返りに活用可能である一方,路線の周辺や直上にGNSSの電波を遮蔽する障害物がある区間では位置情報が欠損し,振り返りへの活用が困難であることが述べられている。これは,試行対象路線であった山手線が東京の都心を走行する路線であり,駅構造物や周囲の建物による遮蔽の影響が表れやすい環境下であったことを反映した結果と考えられる。
本研究では,位置情報が比較的高精度に取得できる路線区間において,営業運転車両にGNSS取得端末を仮設したうえで,55日間にわたってGNSSデータを継続的に測定した。本稿では,本測定で取得したデータを用いて,走行速度パターンの再現精度や走行速度パターン,走行時分および消費電力量のばらつきを分析した結果を報告する。また,走行速度パターンのばらつきを低減できた場合における運行省エネルギー化の可能性に関する試算結果や,省エネルギーな走行速度パターンの考察結果についても述べる。
2. GNSSデータの取得
2.1 計測端末
GNSSデータの計測端末はMicrosoft※1) Surface※1) Pro X LTE モデル(タブレット)を使用し,GNSSデータの記録ソフトを作成・インストールして用いた。本計測端末におけるGNSSデータ測位は,アシストGPS(Global Positioning System:全地球測位システム)とGLONASS(Global Navigation Satellite System:全世界的測位衛星システム)によって行われる仕様である。アシストGPSとは,携帯電話などのデータ通信を補助的に利用して測位する方式である。また,GLONASSはロシアの衛星測位システムである。GNSSデータ取得間隔は仕様により1秒に設定されている。
2.2 取得区間と期間
GNSSデータは阪急電鉄株式会社の宝塚線で取得し,分析対象区間は当該路線で最も長い発着駅間距離を持つ,十三駅~豊中駅の急行運用を選定した。当該区間および運用を選定した理由は,駅間距離の長さから運転方法の自由度が高く,走行速度パターンのばらつきが比較的大きいと想定したことである。なお,当該区間については,計測端末を車両に仮設する前の段階で,営業運転列車の客室内からGNSSデータの受信状況を確認し,大きな欠損なく位置および速度が取得できることを確認した。
データ取得期間は,2023年12月13日~2024年2月5日までの55日間である。分析対象は,自列車の運転において他列車の影響を受けることが比較的少ない閑散時間帯(10時~16時)の列車に限定した。
2.3 現車への仮設
計測端末は2台用意し,1000系[モニタ装置あり,VVVF(Variable Voltage Variable Frequency)車]1編成と6000系(モニタ装置なし,抵抗制御車)1編成に対してそれぞれ仮設した。仮設場所は,大阪梅田駅側先頭車両の運転室内である。計測端末を格納する計測箱を客室仕切り戸に固定し,車両から電源を取れるように計測端末を仮設した。
なお本仮設場所については,車両基地にて,運転室内のさまざまな場所でのGNSS受信状態を事前に調査・確認したうえで,安定した受信ができることと乗務員の業務に支障が出ないこと,および,端末に電源供給が可能であることを考慮して選定した。
2.4 データ取得の状況
データ取得を行った55日間において,2台の計測端末は正常な動作を継続し,GNSSデータを問題なく収集することができた。取得できたデータのうち,分析対象とした10時~16時の運行データ数は,1000系車両で上り/下りともに56サンプル,6000系車両で上りが33サンプル,下りが32サンプルであった。
- ※1)
- MicrosoftおよびSurfaceは,Microsoft Corporationの米国およびその他の国における登録商標または商標である。
3. 運転実績の再現手法
本章では,2章で述べた方法で取得したGNSSデータから運転実績を再現・推定する手法に関し,項目ごとに説明する。
3.1 キロ程
GNSSデータで取得できる位置情報は緯度・経度であるため,車両の位置情報として一般的に用いられるキロ程への変換が必要である。当該変換をするために,緯度・経度とキロ程の関係を表すデータベースを作成した。本データベースは,Google Map※2)上で路線形状をトレースすることで得た緯度・経度のリストと,線路図表から得られる複数のランドマーク(緯度・経度とキロ程の両方が既知)の情報とを併せることで作成した。本データベースを用いることで,列車の運行に沿って得られた緯度・経度をキロ程情報に変換することが可能となる。
3.2 車両速度
車両速度はGNSS受信データに含まれる速度データを使用した。ただし,記録された生の速度データには数秒周期の細かな振動があるため,振動を抑えるために移動平均処理を施したうえで以降の可視化や推定処理に用いた。
また,駅発車時・到着時のGNSS速度データは,駅構造物などの影響で安定しづらいという課題がある。この課題に対しては,発車時・到着時の所定速度以下の速度パターンについて,通常運転時の一般的なノッチ扱いを仮定した所定加減速度の速度パターンで置換する方法を用い,解決した。
まず,駅中間の所定時刻(t3)から前後に速度パターンを検索し,所定の低い速度(Vstop)となる時刻(t2, t4)を求める。出発側については,(t2, Vstop)の地点から時間を遡る方向へ所定加速度を仮定して速度パターンを引き,速度がゼロとなる時刻(t1=推定出発時刻)を求める。到着側については,(t4, Vstop)の地点から時刻を進める方向へ所定減速度を仮定して速度パターンを引き,速度がゼロとなる時刻(t5=推定到着時刻)を求める。
3.3 走行時分
走行時分は,発車時刻から到着時刻までの時間として計算した。ここで発車時刻とは,前述の車両速度データで,発車駅において速度がゼロから正に立ち上がった時刻であり,到着時刻とは,到着駅において速度が正からゼロになった時刻である。
3.4 力行電力量
消費電力量の分析にあたっては,力行電力量で評価する方針とした。これは,他列車の影響を排除し単独列車の走り方に基づく電力消費を評価するためであり,回生電力を考慮せず,力行電力のみで駅間の消費電力量を算出した。
力行電力量の推定方式は先行研究2)に倣った。すなわち,まず車両速度の微分で得た加速度,乗車率仮定での編成重量,および,走行抵抗式に基づく列車抵抗を用い,出力された引張力を運動方程式に則って推定する。そのうえで当該引張力の出力に必要な入力電力を,出力効率を仮定して逆算し推定する。このようにして得られた入力電力を,値が正(力行側)の場合に限定して,駅間の力行電力量を算出する。
ここで乗車率は,分析対象時間帯である10時~16時における現車の目視確認結果に基づき,一律30%と仮定した。また,走行抵抗式はJIS(Japanese Industrial Standards)式に則った。さらに,入力電力を計算する際の出力効率は,インバータ車,抵抗制御車それぞれの一般的な駆動装置の効率値を調査のうえで仮定し,設定した。
- ※2)
- GoogleおよびGoogle Mapは,Google LLCの商標または登録商標である。
4. 可視化・分析結果
可視化および分析の結果を,以降4.1~4.5の項目に分けて説明する。
4.1 走行速度パターンの精度検証
図2|モニタ装置とGNSSの走行速度パターン比較例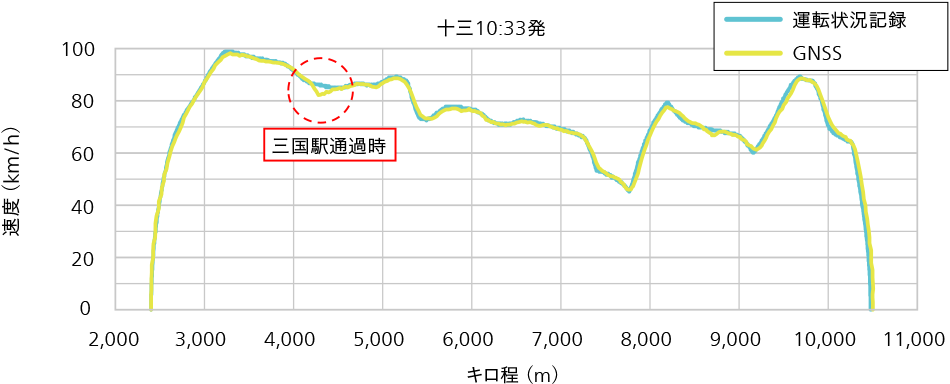 三国駅通過時に5 km/hを超える速度ずれがあるが,マクロな走行速度把握の観点では十分な精度で再現できている。
三国駅通過時に5 km/hを超える速度ずれがあるが,マクロな走行速度把握の観点では十分な精度で再現できている。
GNSSデータから再現した走行速度パターンの精度を確認するため,モニタ装置が搭載されている1000系車両の列車を対象として,モニタ記録(運転状況記録)とGNSSデータを比較した。
結論として,GNSS電波受信状態の悪化に起因する細かい速度ズレが複数存在するものの,駅間全体のマクロな走行速度パターン把握の観点では,GNSSのデータは十分な精度で再現できていると考える。比較の例を図2に示す。図中で赤破線丸は5 km/h以上のずれがあった地点である。
両運行方向で三国駅通過時に速度パターンが頻繁に真値からずれる傾向にあった。三国駅の下りホーム正面には大きめのビルがあるため,その影響でGNSSの速度データ精度が悪化した可能性があると考える。また,同一の場所でも速度ズレが生じる場合と生じない場合があることが分かった。この現象は,衛星位置の都合によるもので,捕捉できている衛星数が少なかった場合に,少しの遮蔽によって精度に影響が出たものと推定する。
4.2 走行速度パターンのばらつき
図3|十三→豊中駅間における速度パターンのばらつきの例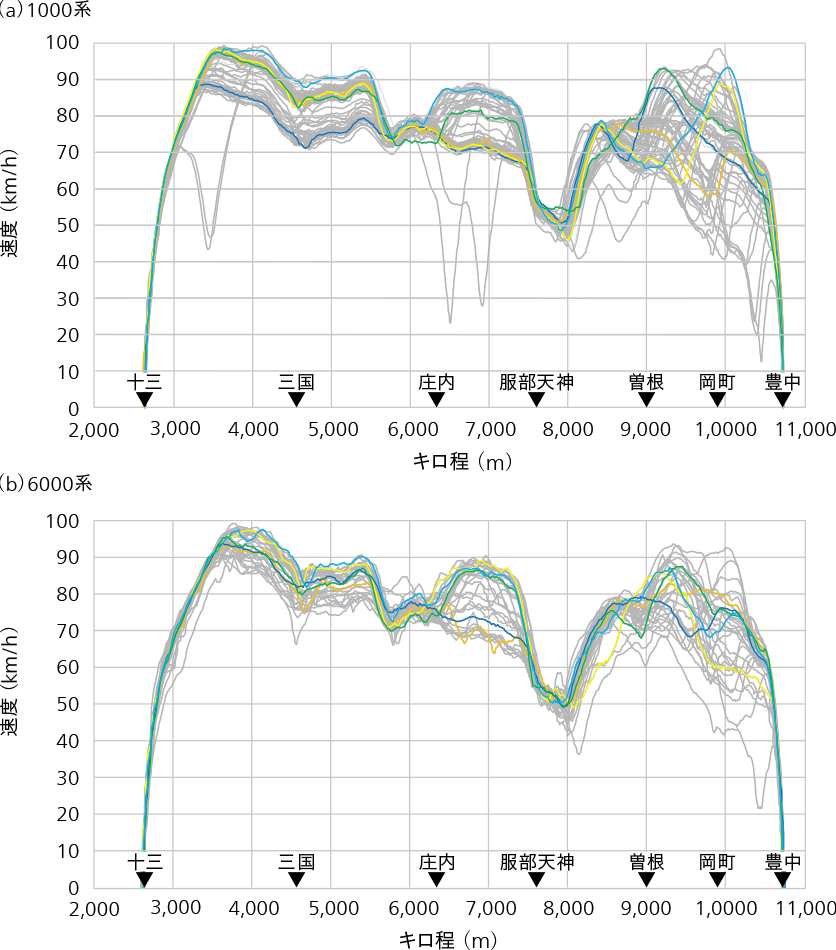 駅間最高速度で走行する区間において,加速の終端速度が10~30 km/h程度ばらついている。
駅間最高速度で走行する区間において,加速の終端速度が10~30 km/h程度ばらついている。
各車系,各駅間について,GNSSデータから再現した走行速度パターンを重ね合わせ,ばらつきの傾向を確認した。十三→豊中駅間の可視化結果を図 3に示す。図中では特徴的な走行速度パターンとして,以下の5種類を色つきで表示している。
- 査定時分±1秒以内の走行時分で省エネルギー(橙色)
- 査定時分±1秒以内の走行時分で非省エネルギー(黄色)
- 査定時分+10秒近辺の走行時分で省エネルギー(青色)
- 査定時分-10秒近辺の走行時分で省エネルギー(緑色)
- 最速のパターン(水色)
両区間・両車系に共通して,駅間最高速度で走行する区間(走行速度パターン形状の山として駅間に複数存在する)において,加速の終端速度が10~30 km/h程度ばらついている。運転士や運行条件の違いによって,駅間走行中に時分を積極的に稼ぐ区間の選び方に関して差異があると考える。また,到着駅付近では,減速と再加速を伴う運転とそうでない運転とが混在する。到着駅付近で減速再加速をする運転は,到着駅進入時の信号現示の影響を受けていると考えられる。
4.3 走行時分と力行電力量のばらつき
図4|走行時分のばらつきの例(十三→豊中)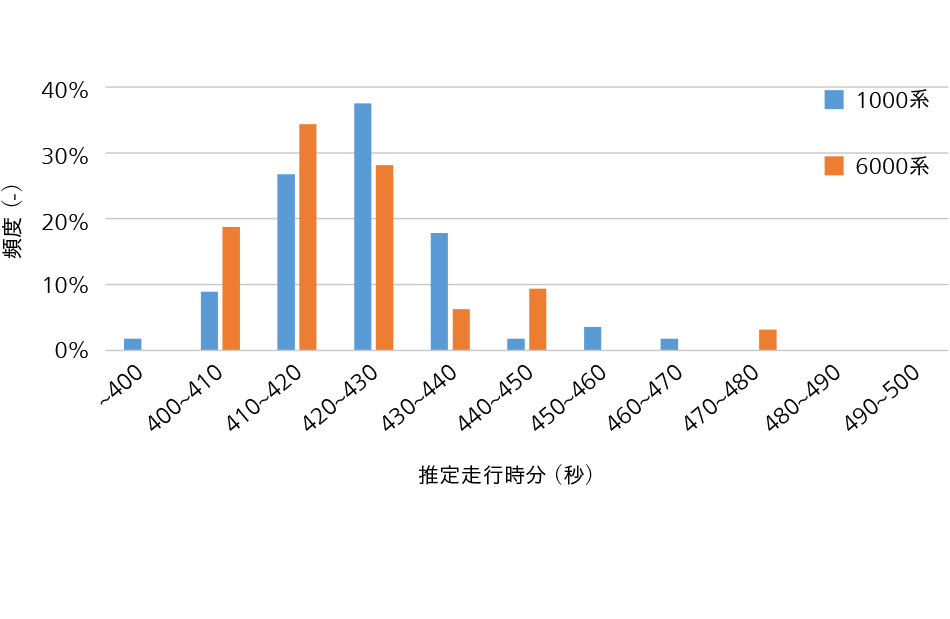 正規分布に近い形状のデータ分布であり,両車系ともに,分布のピーク付近である410~430秒に約6割のデータが含まれる。車系による最頻値の違いもある。
正規分布に近い形状のデータ分布であり,両車系ともに,分布のピーク付近である410~430秒に約6割のデータが含まれる。車系による最頻値の違いもある。
各車系,各駅間について,運行データごとの走行時分と力行電力量を推定した。推定走行時分の頻度分布をヒストグラムで図 4に示す。
- 推定走行時分のばらつき
十三→豊中については,正規分布に近い形状のデータ分布であり,両車系ともに,分布のピーク付近である410~430秒に約6割のデータが含まれていた(1000系で64%,6000系で62%)。また,6000系の方がやや短めの走行時分データが多い傾向であった。
豊中→十三については,短めの走行時分に多くのデータが存在する分布となり,両車系ともに,420秒より短い時分範囲に50%以上のデータが存在した。
- 推定走行時分と推定力行電力量のばらつき
図5|走行時分と力行電力量のばらつきの例(十三→豊中)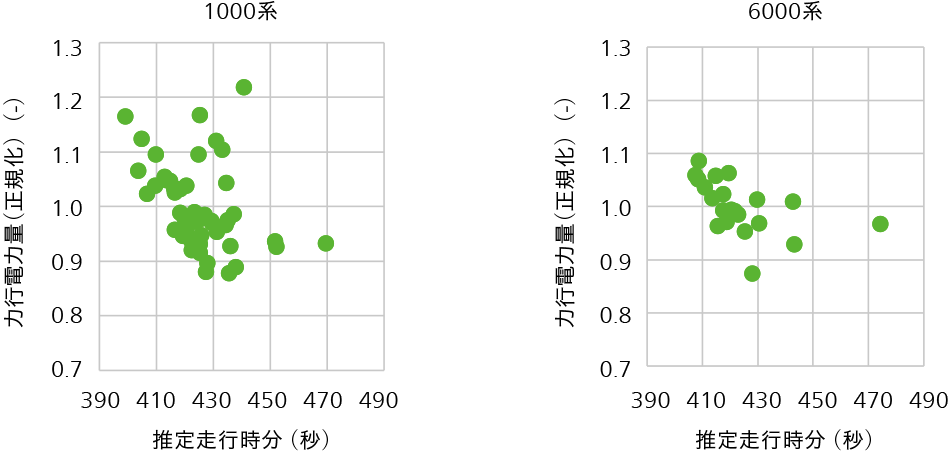 走行時分が430秒以下の範囲において負の相関が見られる。
走行時分が430秒以下の範囲において負の相関が見られる。
推定走行時分と推定力行電力量の関係を表す散布図を図5に示す。なお,ここで推定力行電力量については,各運行データの値を対象駅間および車系における全データの平均値で除して正規化した値で示す。
十三→豊中については,両車系に共通して,走行時分が430秒以下の範囲において負の相関が見られた。走行時分と力行電力量の間に負の相関が見られるのは一般的な現象である。また,当該範囲において,1000系の方が力行電力量の小さい方にデータが集まる傾向にある。両車系とも,440~470秒の走行時分範囲に数点のデータが存在するが,点数が少ないため,車系間の分布の比較は困難である。
4.4 省エネルギー化余地の試算
各車系,各駅間について,推定力行電力量の平均値と最小値を比較した。これはすなわち,何らかの省エネルギー施策によって,対象時分範囲の運行をすべて,最小電力量となる走り方にそろえられた場合を仮定した,省エネルギー化余地の最大値と言える。省エネルギー化余地の計算式は下記の通りである。
省エネルギー化余地(%)=(平均値-最小値)÷平均値×100
ここで,集計対象データの走行時分は,査定時分±10秒以内と仮定して,データの母集団を限定した。また,計算に用いる平均値と最小値は,集計対象時分範囲内における推定力行電力量の平均値および最小値を,対象駅間・車系における全データの平均値で除して正規化した値を用いた。
図6|省エネルギー化余地の試算の例(十三→豊中)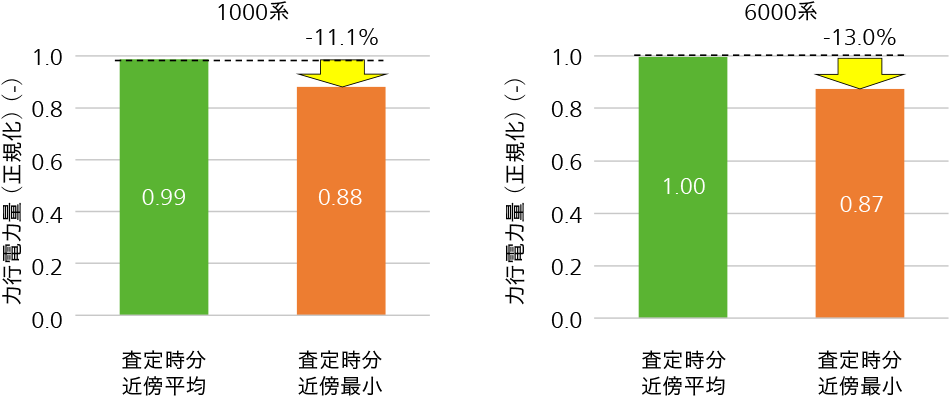 1000系で11.1%,6000系で13.0%の省エネルギー化余地があった。
1000系で11.1%,6000系で13.0%の省エネルギー化余地があった。
省エネルギー化余地の試算結果を,図 6(十三→豊中)に示す。十三→豊中では,1000系で11.1%,6000系で13.0%の省エネルギー化余地があった。豊中→十三では,1000系で16.3%,6000系で9.9%であった。導出された10%前後の省エネルギー化余地の数値は,他社先行研究事例1)と合致する大きさである。なお,図5の散布図からも見て取れるように,6000系については,1000系と比較して運行データのサンプル数が少ないため,運行データを拡充した場合には多少の数値増減が発生し得るが,省エネルギー化余地の数値についてオーダーレベルの変化は生じないと考える。なお本試算は,営業運転中における個別の運行条件の都合を考慮していない概算である。したがって,実際に省エネルギー化の施策を適用した際に発揮されるであろう省エネルギー効果と等価ではないことに留意する必要がある。
4.5 省エネルギーな運転パターンの特徴
図7|代表省エネパターンの例(十三→豊中)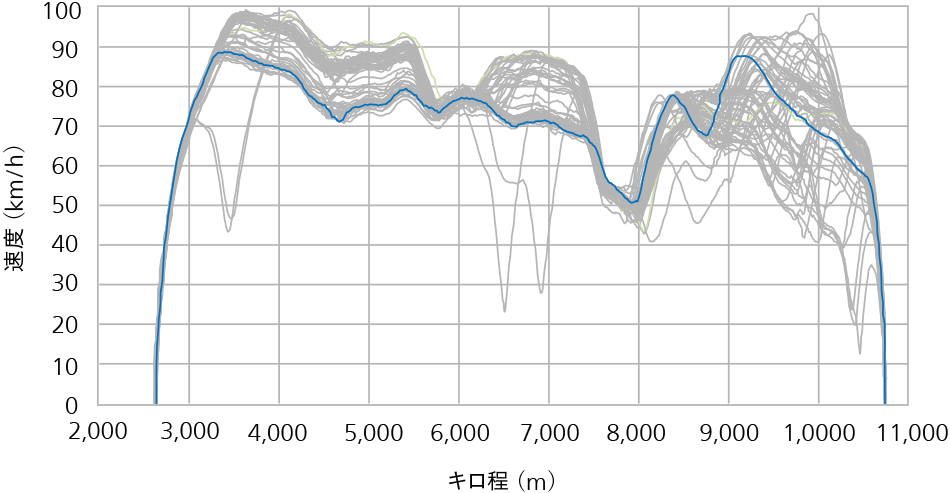 代表省エネパターンにおいては,駅間最高速度で走行する区間では最高速度を最低限に抑える一方,制限速度の低い区間では,制限内で高めの速度で通過する傾向にある。
代表省エネパターンにおいては,駅間最高速度で走行する区間では最高速度を最低限に抑える一方,制限速度の低い区間では,制限内で高めの速度で通過する傾向にある。
前述の省エネルギー化余地試算において,集計対象とした走行時分範囲内で最小の電力量となった運行データ(以下,「代表省エネパターン」と記す。)について,走行速度パターンの特徴を考察した。考察にあたっては前述した走行速度パターンのばらつき状況と比較して特徴を抽出した。ここでは例として1000系についての考察結果を記載するが,6000系についても同様の傾向であった。十三→豊中駅間の代表省エネパターンを図 7に示す。図中で灰色のデータ群が,今回収集した運行データの母集団であり,青色で示されているデータが代表省エネパターンである。
駅間の最高速度については,運行データの母集団には100 km/h弱まで使用しているデータもあるが,代表省エネパターンは,両駅間ともに90 km/h以上の速度帯を使用していない。駅間最高速度で走行する区間においては,母集団では10~30 km/h程度のばらつきがある中で,代表省エネパターンでは,いずれの区間でも下限に近い速度を使用している。また,60 km/hを下回る制限速度区間の通過において,母集団では10 km/h程度ばらつきがある中で,代表省エネパターンは比較的高い速度を使用している。さらに,到着駅の停止ブレーキに向けて,代表省エネパターンは緩やかな減速で進入しており,母集団の一部のデータに見られるような低い速度帯までの減速と再加速はしていない。
以上の分析から,代表省エネパターンの特徴として,以下のことが言える。
- 代表省エネパターンは,駅間最高速度で走行する区間では最高速度を最低限に抑え,その一方で低い速度の制限速度区間は制限内で高めの速度で通過する傾向にある。
- 電力消費が大きくなる高速域の加速を減らし,また,時分への影響が大きい低速域の走行速度を制限の範囲内で高めにする本傾向は,省エネルギーな走行方法のセオリーどおりである。
- 到着駅停止ブレーキ前の挙動は,到着駅における先行列車発車の状況に左右されるため一概には言えないが,代表省エネパターンは駅間の前半~中盤で最高速度を抑えた結果,先行列車に近づき過ぎなかったため,余計な減速・再加速が不要となり,電力消費を抑えた運転になった可能性がある。
5. おわりに
本稿では鉄道運行の省エネルギー化に向けて,車系ごとの設備・機能の違いに依存することなく幅広く運転実績を可視化する方法として,GNSSを用いた方法を提案し,適用可能性を検証プロセスとその結果について述べた。
本検証を通じて得られた走行時分や電力量については複数の仮定の下で推定した結果であるため,その絶対値の信頼性には限界が存在する。値の取扱いや解釈には注意が必要であり,GNSSを用いた本手法の限界を認識したうえで活用するべきと考える。一方で,再現される走行速度パターンの形状は,前述のように実用上十分な精度であり,日々の運行における運転実績の振り返りをするために有用なツールになり得ると考える。また,省エネルギー化だけでなく,運転技能の教育・継承という観点でも活用できる可能性がある。
参考文献など
- 1)
- 東日本旅客鉄道株式会社,JR東日本ニュース,運転エネルギー削減に向けて,山手線で省エネ運転の研究に取り組んでいます(2021.9)
- 2)
- 小田篤史,外:運転技術の見える化システムの開発,日本鉄道サイバネティクス協議会,シンポジウム論文集,第54回(2017.11)
- 3)
- 小田篤史,外:速度データを用いた電力量推定の精度評価,電気学会全国大会,講演番号G306-C3(2019.3)
- 4)
- 磯峻介,外:タブレット型運転支援ツールの実用化に向けた研究,Japan Railway Engineers' Association,Vol.66(2023.9)



