
273系特急形直流電車向け主回路システムの開発
ハイライト
山陰地区と山陽地区を結ぶ西日本旅客鉄道株式会社伯備線の特急「やくも」の安全性・旅客サービス・利便性・乗り心地のさらなる向上に向け,新型特急車両として273系特急形直流電車が開発,新製投入された。
本稿では,振子車体の採用に伴う艤装スペース縮小に対応する主電動機の冷却構造の見直し,車両制御装置へのフルSiCモジュールの採用などの小型軽量化と省エネルギー化の取り組みや,急勾配区間でも安定した車両制御を実現するための高精度な速度センサーレス制御ならびに後退起動制御などの,主回路システムの開発について述べる。
1. はじめに
図1|273系特急形直流電車の外観 性能試験中の273系「やくも」の外観を示す。
性能試験中の273系「やくも」の外観を示す。
西日本旅客鉄道株式会社(以下,「JR西日本」と記す。)では,山陰地区と山陽地区を結ぶ伯備線の特急「やくも」用の車両として,国鉄時代に投入された381系を運用してきたが,安全性・旅客サービス・利便性・乗り心地のさらなる向上を図るため,新型の特急車両として新たに273系特急形直流電車(以下,「273系」と記す。)を開発し,新製投入した(図1参照)。
273系の主回路システムでは,振子車体採用に伴う艤装スペース縮小に対応するため,主電動機の冷却構造の見直し,車両制御装置のVVVF(Variable Voltage Variable Frequency)インバータおよびSIV(Static Inverter:静止形補助電源装置)のパワーユニットにおけるフルSiCモジュールの採用により小型軽量化と省エネルギー化を実現した。また,主な運用線区である伯備線急勾配区間でも安定した車両制御を実現するため,高精度な速度センサーレス制御ならびに後退起動制御の適用を念頭にシステムの開発を進めた。
2. 主回路システム
2.1 概要
主回路システムは,321系以降のJR西日本主回路システムの基本構成である0.5 Mシステムを採用しており,2台の主電動機を一括して制御を行うVVVFインバータと, SIVを一体化した車両制御装置1台を,編成中のすべての車両に搭載している。1編成あたりの車両制御装置台数は4台,M車(電動車)とT車(付随車)の比率は,2M2Tの1:1とした。
VVVFインバータのパワーユニットには,フルSiCモジュールを適用し,省エネルギー化,小型軽量化を図った。またSIVのパワーユニットにもJR西日本では初となるフルSiCモジュールを適用し,車両制御装置のさらなる小型軽量化を図っている。
主電動機は,323系・227系1000台・271系同様に全閉式誘導電動機を採用し,車内静音化のほか,非分解での軸受交換を可能とし,メンテナンス性を向上させた。冷却方式も自冷式であるため,空気を取り込むための専用ブロワを必要とせず,車体風導も不要としている。
制御機能も321系以降同様に,VVVFインバータではベクトル制御と合わせて,VVVFインバータ内の無接点制御装置(論理部)にて車両速度(ロータ周波数)の演算を行う,速度センサーレス制御を採用している。これにより速度検出用のPG(Pulse Generator)センサーを主電動機に搭載する必要がなくなり,主電動機のメンテナンス性や小型大容量化を実現した。
2.2 速度センサーレス制御
2.2.1 原理
273系で採用した速度センサーレス制御の基本原理について述べる。
速度センサーレス制御方式については種々の方式が提案されているが,基本的にモータ内部に発生した誘起電圧を利用しているという点では多くの方式が共通している。モータに印加する周波数(インバータ周波数)と磁束指令の積に応じてモータへの印加電圧(インバータ出力電圧)を求め,これをモータに印加するとモータ内に磁束が発生し,磁束とロータ回転周波数の積による誘起電圧が生じる。インバータ出力電圧とこの誘起電圧の差に応じてトルク電流(≒ロータに流れる電流)が流れることから,逆にトルク電流を観測すればインバータ周波数とロータ回転周波数の差が分かる。すなわち,ロータ回転周波数の推定値(速度推定値)を得ることができる。
2.2.2 速度センサーレス制御の課題
一方で速度センサーレス制御は,モータの誘起電圧を利用して速度推定を行う原理上,ゼロ速度付近では相対的に出力電圧精度が低下して速度推定誤差が大きくなり,ゼロ速度を中心として速度推定困難な領域が存在する。このため,上り勾配区間において,停車状態からブレーキを緩解し,車両が後退した状態で力行ノッチを入れて力行起動(登坂)させる「後退起動」の制御調整に苦労している実態がある。安全で安定的な輸送のためには,急勾配におけるスムーズな後退起動は不可欠であり,321系において速度センサーレス制御を採用して以降,より高精度な速度センサーレス制御の開発を進めてきた。
後退起動に失敗した場合,車両速度を見失い車両が後退を続けることで保安装置が働き非常ブレーキが動作する,あるいは後退起動に成功した場合でも,推定速度と実際の車両速度との乖離が大きいと,VVVFインバータに必要以上の電流が流れてしまい過大な車体振動が発生する,といった事象が発生し,安全で安定的な輸送に支障をきたすこととなる。
今回273系が走行する伯備線は,曲線区間や急勾配区間が連続する山間部での走行が大部分を占めており,後退起動制御の制御性能向上がより一層重要となっている。
また速度センサーレス制御を採用した321系時の主電動機に比べ,昨今の主電動機は低すべり化が顕著であり,制御の難しさは年々増している状況にある。
2.2.3 後退起動制御への対応
勾配区間に車両が停車し,後退起動を実施する際,車両速度がマイナスの状態から制御が開始されるため,前述の速度推定困難な領域を通過することとなる。したがって後退起動時は,基本的にロータ角周波数の推定値をフィードフォワード的に生成することによって,ゼロ速度付近の速度推定困難領域を通過することとなるが,このとき所定のトルクを確保し,安定した力行駆動を実現するために増磁制御を行う仕様とした。
図2|すべり角周波数と発生トルクの関係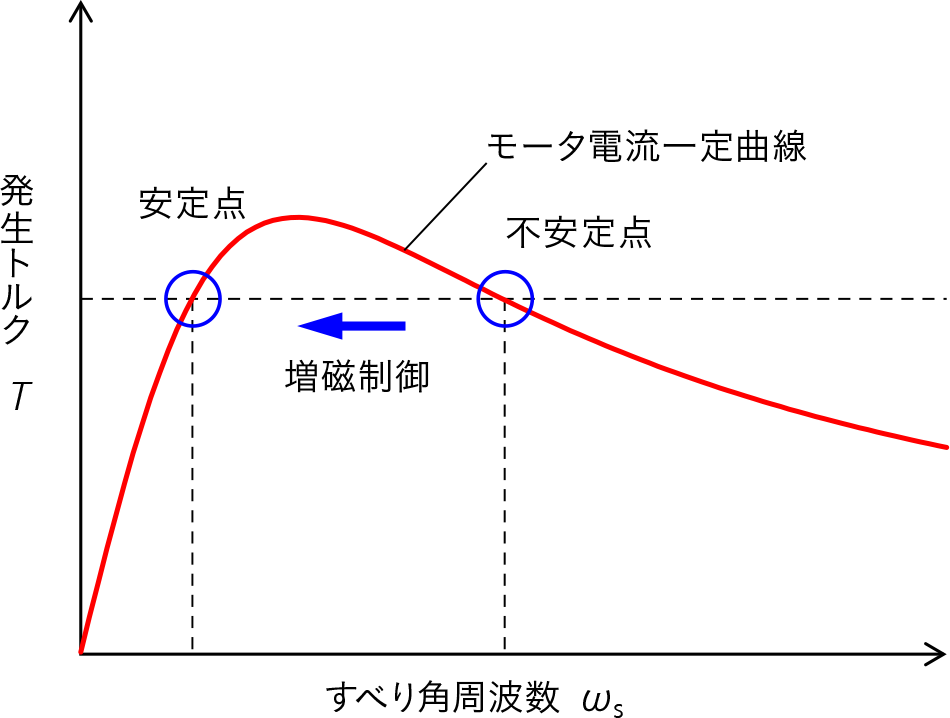 増時制御によって安定点に移行する。
増時制御によって安定点に移行する。
図3|モータ電流一定曲線と動作点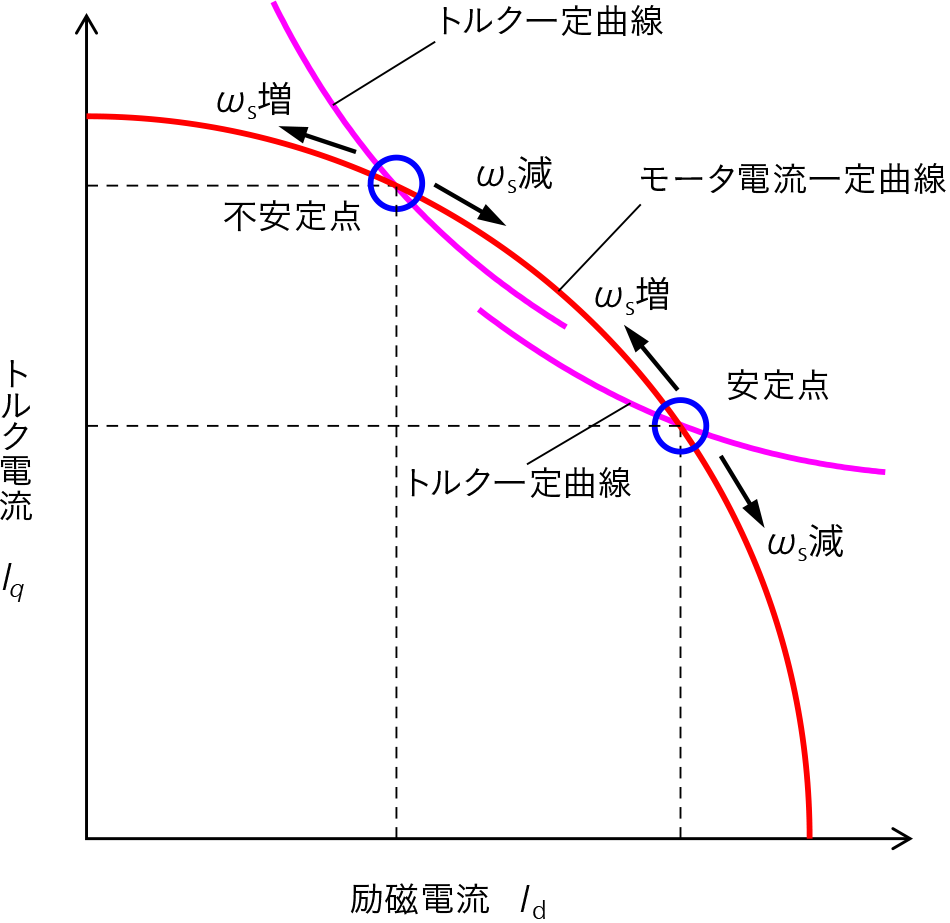 安定点ではすべり角周波数が増加するとトルクが増加する。
安定点ではすべり角周波数が増加するとトルクが増加する。
増磁制御について以下に述べる。誘導電動機の発生するトルクは,すべり角周波数とモータ電流で表すことができる。モータ電流が一定になるよう電流制御を行った場合のすべり角周波数と発生トルクの関係を図2に,モータ電流一定曲線とトルク一定曲線の関係を図3に示す。
図3においてモータ電流一定曲線は円周であり,トルク一定曲線は各動作点近傍でトルク一定となる励磁電流とトルク電流の関係を描いたものである。磁気飽和を無視すればトルク一定曲線は反比例の関係となる。
フィードフォワード的に生成するロータ角周波数推定値が実際のロータ角周波数よりも大きく,すべり角周波数が所定値よりも大きい場合を考える。モータ電流が一定になるように電流制御を行っているので,動作点はモータ電流一定曲線(円周)上を反時計回りに移動する。不安定点では,動作点がトルク一定曲線よりも下にあるためトルクが減少し,加速も低下するため,ロータ角周波数の推定誤差は拡大していく。
一方,安定点ではすべり角周波数が増加すると,動作点はトルク一定曲線よりも上にあるため,トルクが増加し,加速も増加することによって推定誤差は減少する。すなわち元の動作点に戻るような復元力が働く。
このように後退起動制御においては,増磁制御によってモータを安定点に移行させ,フィードフォワード的に生成したロータ角周波数推定値に対して,実際のロータ角周波数が追従するように制御を行うことで安定した加速を確保する。
なお,実際には誘導電動機の磁気飽和を考慮して増磁制御による動作点を決定している。
後退起動時の制御状態の遷移については,初期速度推定後,後退状態を検知すると,後退起動制御モードに移行し増磁制御を行う。その後車両が加速しゼロ速度を通過すると,増磁制御を終了し通常制御に戻ることとなる。
また後退起動時の制御安定性には,車両起動後の初期速度推定精度も重要な要素である。273系においては初期速度推定精度を向上させるため,フルSiCモジュールの適用によるインバータの出力電圧精度向上を図った。これについては次節で述べる。
2.3 フルSiCモジュールの適用
273系ではVVVFインバータおよびSIVのパワーユニットに,SiCMOSFET(Metal Oxide Semiconductor Field Effect Transistor)を搭載した,フルSiCモジュールを採用した。
フルSiCモジュールは高パワー密度化が可能であり,モジュール内に二つの半導体モジュールを実装した2in1モジュールを実現している。したがって,同容量のSi-IGBT(Insulated Gate Bipolar Transistor)モジュールと比較して実装面積を約50%低減でき,フルSiCモジュールの適用により,車両制御装置の小型・軽量化が可能である。
また,素子スイッチングのデッドタイム(ターンオフ~ターンオンまでの時間)は,流れる電流の大きさによって変動するが,従来のIGBTモジュールに対し,フルSiCモジュールにはこの変動が小さいという特徴がある。
このため,小電流で速度推定を行う初期速度推定中において,デッドタイムの変動が大きいIGBTモジュールでは推定速度に誤差が生じやすかったのに対し,変動の小さいフルSiCモジュールでは速度推定に誤差が生じにくく,推定精度を向上できるというメリットを有している。
2.4 パワーユニット
273系では,271系などと同様にVVVFインバータパワーユニットにフルSiCモジュールを適用し,SIVのパワーユニットにもJR西日本としては初となるフルSiCモジュールを適用している。
さらに,273系以前に投入した271系などではVVVFインバータとSIVのパワーユニットを一体化する方式を採用していたが,273系ではVVVFインバータとSIVをそれぞれ個別のパワーユニットとする方式を採用した。これにより,冗長性の向上,ならびにパワーユニットの管理・保守性の向上を図った。なお,パワーユニットに搭載するフルSiCモジュールの容量は,VVVFインバータ用,SIV用としてそれぞれに最適化されているが,パワーユニットの基本的なハードウェア設計を共通化することにより,容量の大きいVVVFインバータ用パワーユニットを,SIV用パワーユニットとして使用することも可能としている(逆は不可である)。
2.5 車両制御装置の特徴と小型・軽量化効果
273系は曲線の多い伯備線走行に伴い,曲線での乗り心地向上ため振子式車両を採用している。これに伴う床下艤装面積の低減に対応するため,車両制御装置のレール方向および枕木方向の小型化が必要であった。
このため,前述のフルSiCモジュール適用による小型・軽量化だけでなく,運転台指令のデジタル化(制御伝送主体化)に伴う不要なメタル線の削除,ならびに,箱内ユニット機器の最適化(不要な機器や準備工事の削除を含む)によって,システムとしての最適化と,さらなる小型・軽量化を図った。一方で,高速度遮断器や断流器などの機器については,既存の271系などと共通化を図り,保守・運用性を確保している。
273系向けWPC19-(H)形車両制御装置の外観を図4に示す。
また,既存の271系向け車両制御装置との比較結果を表1に示す。同等のVVVF,SIV容量を有しつつ,筐体寸法として-15%,機器重量として-13%の小型軽量化を実現した。
図4|WPC19-(H)形車両制御装置外観 SiCモジュールの適用などにより小型軽量化を実現した。
SiCモジュールの適用などにより小型軽量化を実現した。
表1|車両制御装置の仕様比較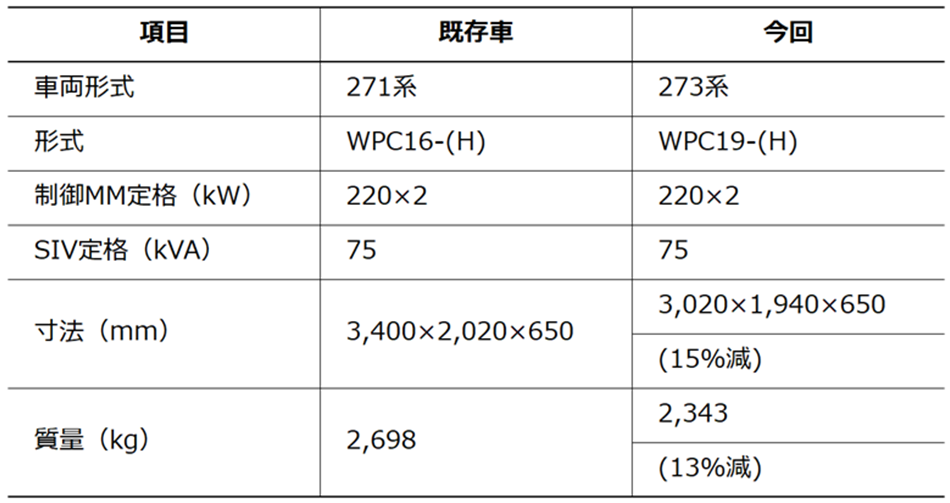 既存車と同等の制御容量,かつ寸法として-15%,質量として-13%の小型軽量化を実現した。
既存車と同等の制御容量,かつ寸法として-15%,質量として-13%の小型軽量化を実現した。
2.6 主電動機
主電動機は台車装置内に艤装されるため,台車枠内に収まるように設計する必要がある。JR西日本では標準的に車輪径860 mm(最大時)の車輪を搭載しているが,273系の場合は振子台車であるため,車輪径810 mm(最大時)の小径車輪を採用する必要があり,艤装の寸法制約が厳しくなる。そのため,271系で採用した全閉式主電動機は艤装制約上そのまま搭載することができず,出力を維持したまま7%以上体格を小型化する必要があった。
出力を変えることなく主電動機を小型化する場合,出力÷質量を指針とする出力密度が増加することになる。一方で,同出力を出すための電流が増加することによる損失増加,体格が小さくなることによる冷却能力の低下などの影響により,主電動機の温度が上昇することが課題となる。そのため,主電動機は電気的効率を上げて損失自体を下げる,または冷却性能を上げて温度上昇を抑えるといった設計的な工夫が必要となる。今回本機においては,JR西日本として初採用となる対向流冷却を利用した全閉外扇方式を採用することによって冷却性能を引き上げ,日立標準の既存全閉式主電動機に対し25%の高出力密度化を達成し,振子台車に搭載可能な主電動機を実現した(図5参照)。
主電動機の主要項目の比較を表2に示す。
図5|WMT110形主電動機外観 対向流冷却を利用し小型化を実現した。
対向流冷却を利用し小型化を実現した。
表2|主電動機の諸元比較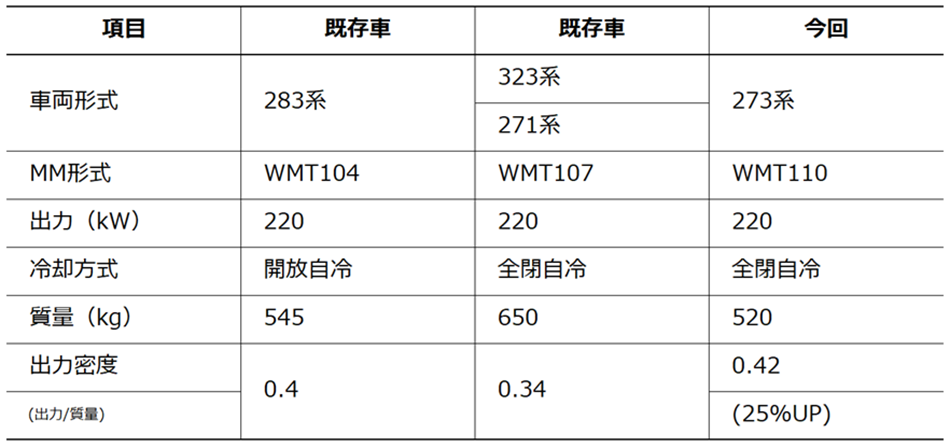 既存機に対して25%高出力密度化を達成し,出力を落とさずに振子台車への搭載を実現した。
既存機に対して25%高出力密度化を達成し,出力を落とさずに振子台車への搭載を実現した。
3. 性能評価
開発した主回路システムを273系に搭載し,本線走行試験で性能を評価した。
3.1 力行・ブレーキ試験結果
力行性能および回生ブレーキ性能が設計値どおりとなっていることを確認するため,力行・ブレーキ試験を実施した。この結果,力行,回生ブレーキともに,電流や電圧に異常な振動などが見られず,良好に制御されていることを確認した。
3.2 温度上昇確認結果
表3|温度上昇確認結果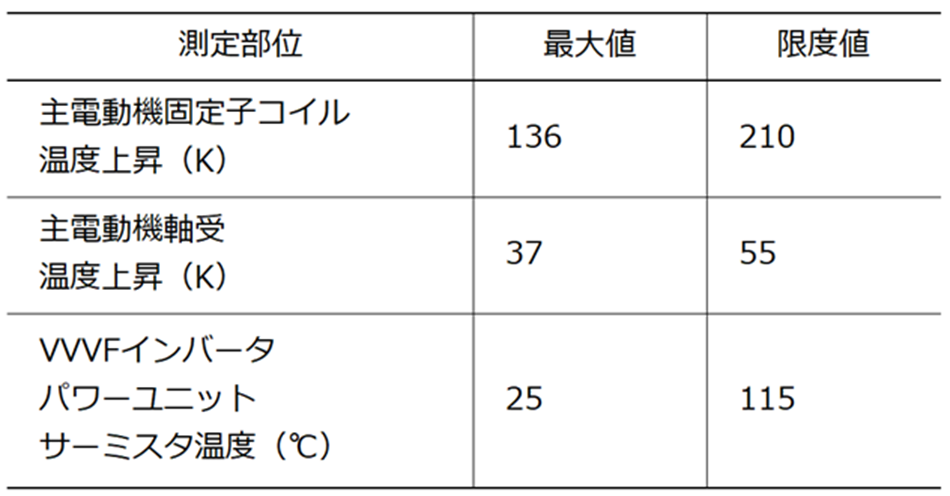 1ユニット開放状態での往復運転にて,許容値以下となっていることを確認した。
1ユニット開放状態での往復運転にて,許容値以下となっていることを確認した。
VVVFインバータのパワーユニット温度および主電動機温度が設計上の限度値を超えないことを確認するため,273系の運用線区である出雲市駅~岡山駅間(往復)を走行させ,温度測定を行った。車両状態は,健全状態と1ユニット(車両制御装置1台と主電動機2台)開放状態(1.5M2.5T)において実施した。
試験結果を表3に示す。VVVFインバータのパワーユニット温度,主電動機温度のいずれも許容値温度以下となっていることを確認した。
3.3 勾配起動(後退起動)試験結果
表4|勾配起動試験条件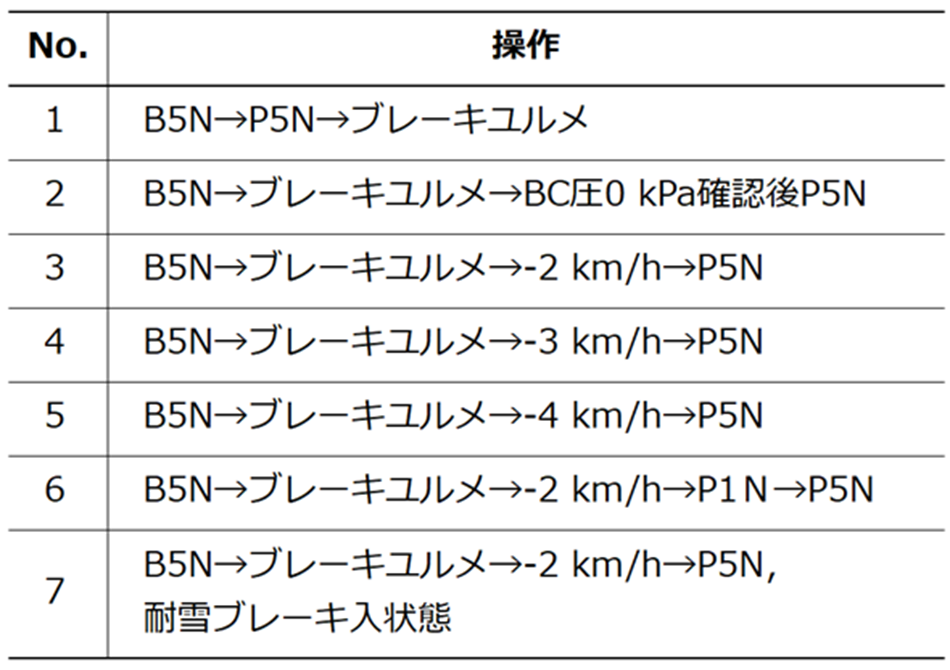 さまざまな操作条件で勾配起動試験を実施し,制御性能を評価した。
さまざまな操作条件で勾配起動試験を実施し,制御性能を評価した。
図6|勾配起動(後退起動)試験結果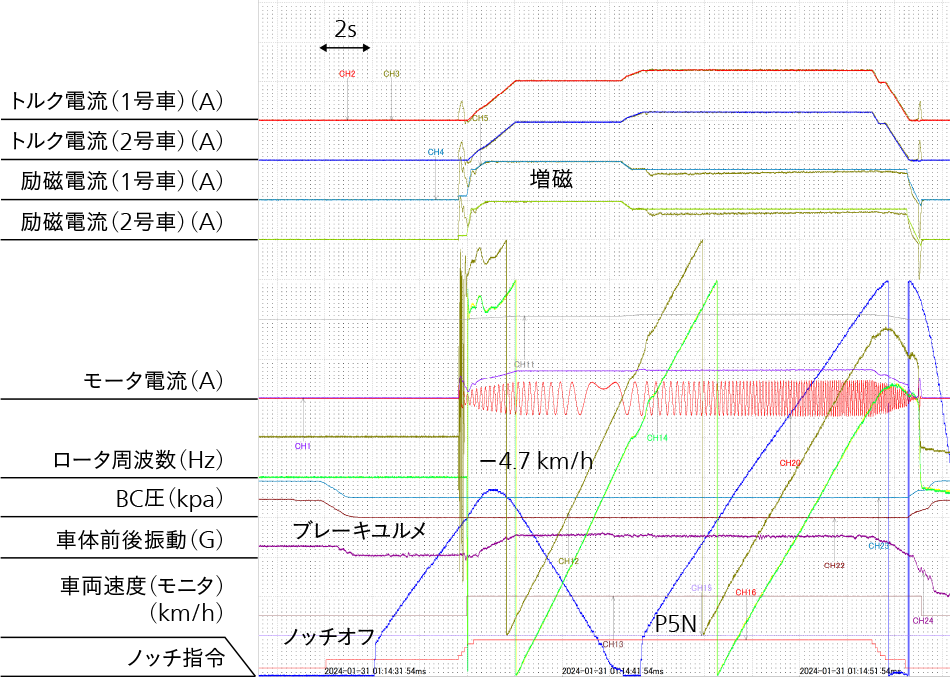 B5N→ブレーキユルメ→-4 km/h→P5N,勾配25‰での試験結果を示す。
B5N→ブレーキユルメ→-4 km/h→P5N,勾配25‰での試験結果を示す。
伯備線で勾配が連続する新郷駅~生山駅間を中心に勾配起動(後退起動)試験を実施し,後退起動制御の性能について確認した。勾配起動試験は,試験開始地点や試験条件(表4参照)を変え,評価を実施した。勾配条件については,運用線区の最大勾配である25‰に加え,15‰,および後退起動開始速度がゼロ速度付近となり初期速度推定が難しい5‰において実施した。車両状態は,健全状態と車両制御装置故障時を想定した1ユニット開放状態(1.5M2.5T)でそれぞれ実施した。
試験結果の代表チャートを図6に示す。ブレーキユルメ後,車両が-5 km/h付近まで後退した状態から制御が開始されているが,初期速度推定によって後退速度を精度よく推定できており,その後,増磁制御によって安定して加速し,ゼロ速度を通過後に通常の制御に移行していることが分かる。
試験は1条件で数十試番を実施したが,すべての試験において勾配起動失敗が発生せず,安定して勾配を登ることができた。また,後退起動開始~ゼロ速度通過~加速のいずれのフェーズにおいても,過大な車体振動やトルクショックが発生せず,良好に制御できていることを確認した。
273系において,後退起動が可能となった主な内容は以下である。
- 速度推定誤差が大きくなるゼロ速度付近で,適切なトルクで推定速度が上昇するよう調整したことにより,ゼロ速度付近の速度推定困難領域を通過しやすくなり,安定した後退起動が可能となった。
- フルSiCモジュールの採用によりデッドタイムの変動が短くなることで,初期速度推定時の推定精度向上が可能となった。
- そのほか,既存車での経験などを踏まえ,最適な制御調整値の適用が可能となり,速度推定精度が向上した。
4. おわりに
273系の主回路システムの開発により以下の3点を実現した。
- 車両制御装置のVVVFインバータ,SIVのパワーユニットへのフルSiCモジュール適用により,車体断面の小さい振子車体に適用可能な小型の車両制御装置を開発した。
- 主電動機へ対向流冷却を利用した全閉外扇方式を採用することで,車輪径810 mmの小径車輪に対応した小型の主電動機を開発した。電気式気動車を含めた小径車輪搭載車両への展開も可能である。
- 急勾配においても安定した後退起動が可能な高精度の速度センサーレス制御を開発し,安定した後退起動ができることを確認した。
273系は2024年4月から「やくも」での運用を開始しており,これまでにY1編成~Y11編成の計11編成が営業投入されている。伯備線での末長い活躍を期待したい。
参考文献など
- 1)
- 鶴岡誠治,外:273系特急形直流電車「やくも」の概要,Japan Railway Engineers' Association,Vol.67(2024.5)
- 2)
- 児島徹郎,外:速度センサーレスベクトル制御の実用化~零速度高トルク制御による低速域の加速安定化~,鉄道サイバネ・シンポジウム論文集(2004.11)



