
遠隔化施工に向けた3Dデジタルツインシステム
1. はじめに
近年の建設業では,熟練作業者の減少と若者離れが懸念されている。一方で,今後も建設業は堅調に需要が増えると予測されることから人手不足は深刻な課題である。さらに,働き方改革に関連して現場作業の高効率化が課題となっており,DX(デジタルトランスフォーメーション)を通じた情報化施工による生産性向上が求められている。
これに対し,株式会社日立プラントコンストラクションは,現場作業の効率化に直結する施工の省人化・省力化を目的とした遠隔化施工に着目した。遠隔化施工とは,作業員の代わりとなる遠隔装置を使用し,装置に取り付けられたカメラ映像やセンサーの計測データを基に,現場から離れた場所で遠隔操作による作業を行うことである。近年,遠隔化施工を目的としたハードウェアおよびソフトウェアの開発が盛んになっており,さまざまな建設現場での取り組みが報告されている1),2)。
日立プラントコンストラクションは,これまで遠隔操作による鋼材切断や機器据付などのさまざまな遠隔化施工に取り組んできた3),4)。本作業では,各種遠隔装置および作業エリア内に複数のカメラを設置し,現場から離れた遠隔操作室で複数のカメラ映像を目視確認しながら遠隔操作を実施した5)。このとき,遠隔操作室では大型ディスプレイに表示したカメラ映像を作業監督者が細心の注意を払いながら確認し,遠隔操作者に指示を与えながら安全に遠隔作業を実施した。
しかし,複数のカメラ映像を目視確認しながら行う遠隔作業には,次のような課題があった。まず,カメラの設置台数や場所に制限があるため,遠隔操作時の死角を完全になくすことは困難である。さらに,装置と周辺機器との定量的な距離の把握が難しい。したがって,遠隔装置の挙動を俯瞰してイメージできる操作者の熟練した勘と経験が必要であった。これに対し,遠隔化施工の高効率化を目的とした遠隔操作のスキルレス化が求められている。
これを受け,日立プラントコンストラクションは,現場内の各種遠隔装置を多角的かつ詳細に把握できる視覚支援ツールとして,3D(Three Dimensions)デジタルツインシステムの開発に着手した。
本稿では3Dデジタルツインシステムの概要および主な機能を紹介する。また,本システムの検証試験の結果や今後の展開について述べる。
2.3Dデジタルツインシステムの概要
2.1 仮想空間の構築と自己位置の推定
3Dデジタルツインシステムの概要を図1に示す。
まず,3Dビューワ上に点群やCAD(Computer-aided Design)モデルで表現したロボット周囲環境の仮想空間を構築後,ロボットの3Dモデルを重ねて表示する。3Dビューワ上に点群やCADモデルを用いた仮想空間を構築するにあたっては,CADモデルを用いた仮想空間が構築可能な3Dビューワを選定した。
次に,フィジカル空間[同図(a)参照]の実機センサー情報から仮想空間上のロボットの3Dモデル[同図(b)参照]にロボットのアーム部関節角度,車体部姿勢,自己位置情報を反映する。このとき,仮想空間内におけるロボットの自己位置情報は,周囲環境の地図作成と自己位置推定を同時に行うSLAM(Simultaneous Localization and Mapping)を使用している。さらに,フィジカル空間上の実機と仮想空間上の3Dモデルの各種データの送受信のためのネットワーク構築には,ROS(Robot Operating System)を使用した。
これらのネットワークにより,実機のロボットと3Dモデルがリアルタイムに追従することで3Dによる連動が実現可能となる。
図1|3Dデジタルツインシステム概要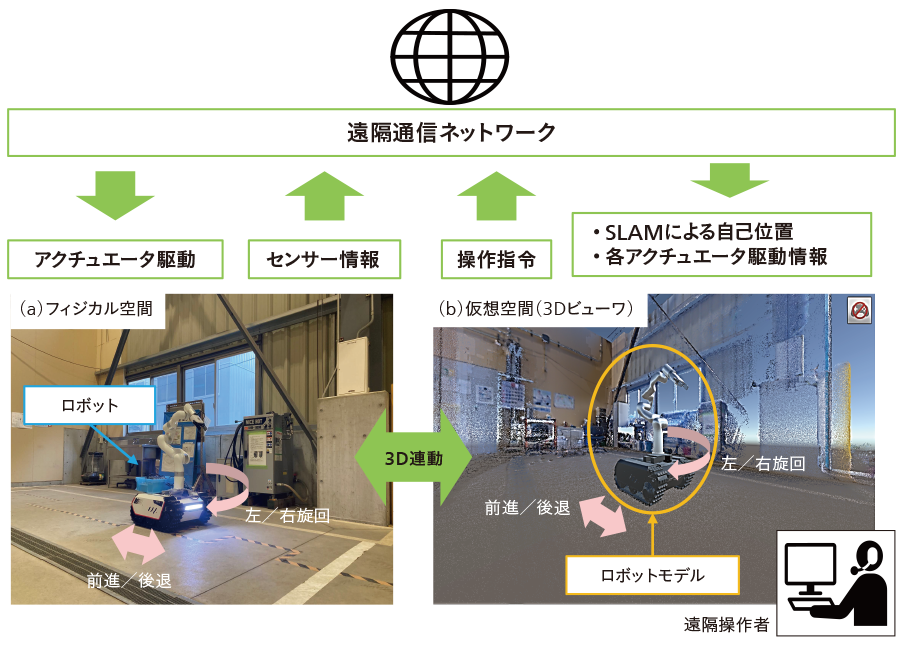 注:略語説明
注:略語説明
SLAM(Simultaneous Localization and Mapping),3D(Three Dimensions) 3Dビューワ上で点群やCAD(Computer Aided Design)モデルによるロボット周囲環境を構築後,ロボットの3Dモデルを重ねて表示する。遠隔装置の各センサー情報はネットワークを介して3Dビューワ上のモデルに反映する。
2.2 干渉回避フィードバック制御機能
遠隔操作によって安全に遠隔作業を実施するためには,操作時に遠隔装置を周囲の物体に衝突させないことが重要である。そこで,3Dビューワ上の遠隔装置のモデル全体を覆うように任意の大きさで設定した干渉判定用モデルを構築する。そして,遠隔装置の周囲モデルが干渉判定用モデルに接触した場合に,減速または停止の制御信号を実機に送信する干渉回避フィードバック制御機能を開発した。この機能の説明を図2に示す。
まず,ロボット車体部の中心軸を基準に干渉判定用モデルとして2種類の円筒形状の大きさを任意に設定する[図2(a)参照]。このとき,停止範囲(内側の円筒)内に静的な周囲モデルが接触すると,実機ロボットの車体部に停止する制御信号をネットワークを介して送信する。また,動的な周囲対象物(人・物)に対しては実機のLiDAR(Light Detection and Ranging)の計測範囲内に入った場合に停止する。同様に,減速範囲(外側の円筒)内に周囲モデルが入った場合は,実機ロボットの車体部に減速する制御信号をネットワークを介して送信する。ロボットの干渉判定モデルに周囲モデルが接触したときの減速および停止の状況を同図(b)(c)に示す。各領域への侵入判定と連携して,周辺機器への接近状況に応じた減速・停止・干渉などのステータスをビューワ画面上に表示する機能である。
図2|干渉回避フィードバック制御機能概要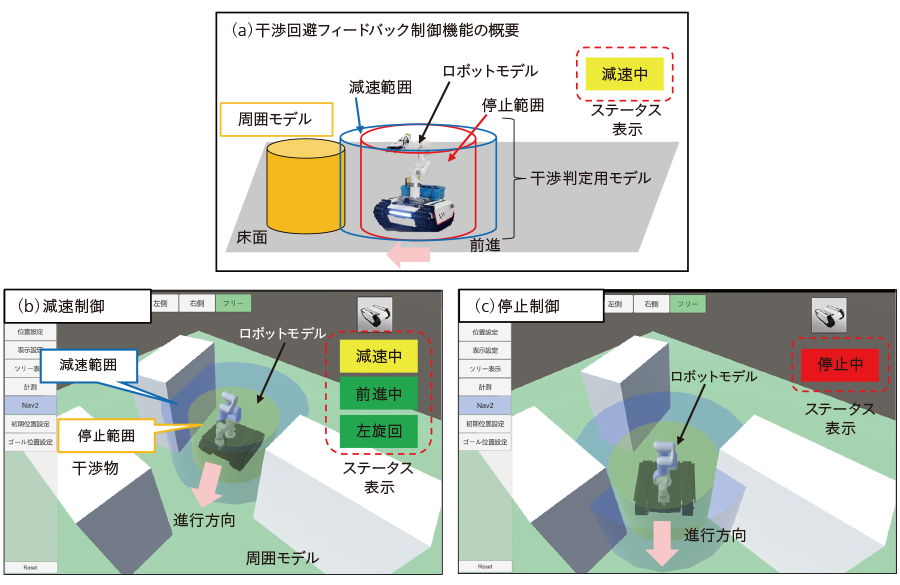 (a)は周囲モデルと干渉判定用モデルの相対距離に応じて減速及び停止範囲に接触した場合,操作指令値を3Dビューワから実機に対して与える管掌回避フィードバック制御機能の概要を示す。(b),(c)は周辺機器への接近状況に応じ,それぞれ減速・停止・干渉のステータスを3Dビューワ画面上(右側上)に表示した例を示す。
(a)は周囲モデルと干渉判定用モデルの相対距離に応じて減速及び停止範囲に接触した場合,操作指令値を3Dビューワから実機に対して与える管掌回避フィードバック制御機能の概要を示す。(b),(c)は周辺機器への接近状況に応じ,それぞれ減速・停止・干渉のステータスを3Dビューワ画面上(右側上)に表示した例を示す。
3. 検証試験
3.1 概要
3Dデジタルツインシステムおよび干渉回避フィードバック制御機能の検証を行った。検証試験で使用する遠隔化仕様のマニピュレータ付きクローラロボット(以下,「検証用ロボット」と記す。)の概要を述べる。検証用ロボットの構成を図3に示す。マニピュレータの各関節には計6個のエンコーダが取り付けられており,クローラには駆動輪に計2個のエンコーダ,車体先端に2D LiDAR(Two Dimensions LiDAR),車体中央に車体の傾斜角度や地軸回り旋回角度を計測するIMU(Inertial Measurement Unit)センサーが取り付けられている。
モックアップ設備の外観を図4に示す。(a)は全体図,(b)は対象物付近の拡大図であり,合計4か所にネットワークカメラを設置している。検証試験は,板状の対象物を把持・撤去する遠隔作業を想定して実施した。作業手順は以下のとおりである。
- スタート位置から対象物の前まで,検証用ロボットを移動する。次に,マニピュレータを操作し,先端のグリッパと対象物との位置関係を調整する[同図(a)参照]。
- グリッパで対象物を把持して持ち上げる[同図(b)参照]。
本検証試験では,ネットワークカメラのみを用いた遠隔操作,およびネットワークカメラと3Dビューワの両方を用いた遠隔操作の2パターンにおける遠隔操作性を比較検証した。
図3|検証用ロボットの外観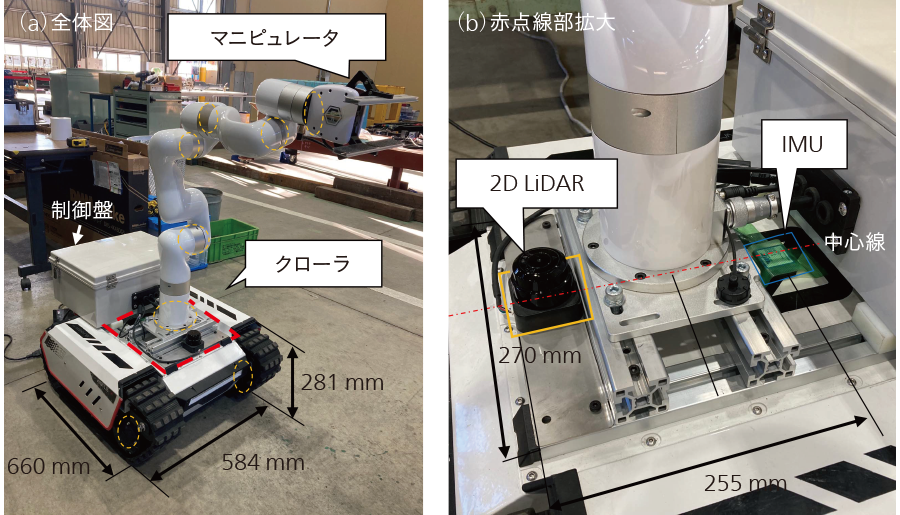 注:略語説明
注:略語説明
2D LiDAR(Two Dimensions Light Detection and Ranging),IMU(Inertial Measurement Unit) 検証用ロボットは,クローラ[Bunker mini(Agile X製) ] ,マニュピュレータ[Xarm 6(Ufactory製) ],2D LiDAR[RPLiDAR S1(Slamtec製) ] ,IMU[WT61C(Witmotion製) ]から成る。
図4|モックアップ設備の外観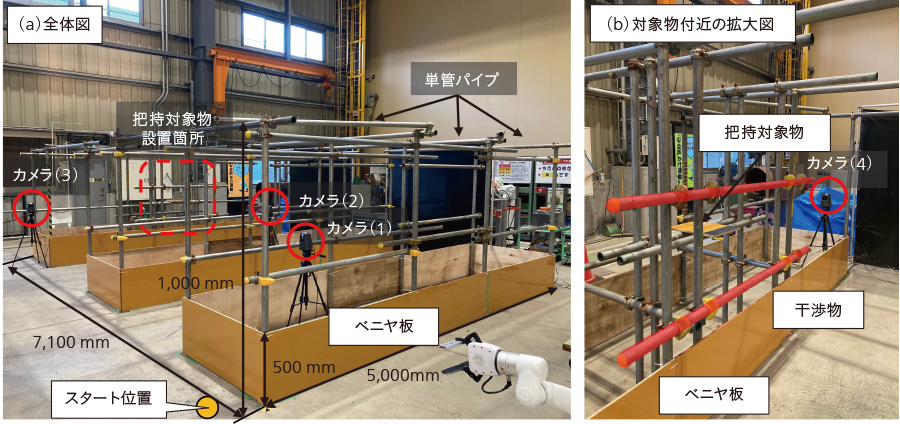 モックアップ設備は単管パイプとベニヤ板で構成される。検証用ロボットに取付けた2D LiDAR(取付高さ300 mm)がベニヤ板を認識できるように,ベニヤ板の高さは500 mmに設定した。
モックアップ設備は単管パイプとベニヤ板で構成される。検証用ロボットに取付けた2D LiDAR(取付高さ300 mm)がベニヤ板を認識できるように,ベニヤ板の高さは500 mmに設定した。
3.2 結果
ネットワークカメラ映像と3Dビューワ画面の双方を確認して,前述の内容で検証試験を実施した。
初めに,スタート位置から対象物の前まで検証用ロボットを移動した際の結果について説明する。モックアップ試験における3Dビューワ画面およびカメラ映像を図5に示す。(a)は,モックアップ設備上方からの3Dビューワ画面を示しており,天井部にカメラが取り付けられない場合でも,設備内のロボットの現在位置を俯瞰して把握できることが分かる。
次に,マニピュレータを操作し,先端のグリッパで対象物を把持して持ちあげた際の結果を示す。(b)はビューワ画面,(c)はカメラ映像を示す。3Dビューワ画面では,干渉物である単管パイプを回避している状況を確認できた。また,実機のグリッパ先端に対象物が追従して持ち上げている状況を3Dビューワ上で再現できることを確認した。図5(c)より,マニピュレータが同時刻に同じ姿勢で表示されており,実機と3Dビューワ上のモデルがリアルタイムに連動できていることを確認した。
以上より,3Dデジタルツインシステムは,操作中にロボットと周辺機器との位置関係を任意の視覚方向から確認できるため,遠隔化施工で有効であることが分かった。
次に,干渉回避フィードバック制御機能の検証結果を説明する。検証用ロボットのサイズを考慮して,前述の干渉判定モデルの減速範囲はモデル中心軸から直径1,500 mmの円筒,停止範囲(内側)は直径1,000 mmの円筒として設定した。また,クローラの標準走行速度0.35 m/sに対して,減速領域内にオブジェクトが侵入すると0.20 m/sに減速するように設定した。対象物に対して検証用ロボットが前進した際に減速(外側)および停止(内側)エリアに接触し,それぞれ減速および停止した状況の3Dビューワ画面を同図(d)に示す。このとき,実機クローラにおいても減速および停止を確認した。また,停止後に誤って前進操作をしても,実機は停止することを確認した。さらに,3Dビューワ画面右上に,停止中というステータスが正しく表示されることを確認した。
以上の結果から,干渉回避フィードバック制御機能は,停止範囲内であれば誤操作をしても周辺機器にロボットが干渉しないため,遠隔化施工の安全性が確保できることが分かった。また,3Dビューワ画面上に周辺機器への接近状況の減速・停止・干渉などのステータスを表示することによってスキルレスな遠隔操作につながることを確認した。
図5|各検証試験状況における3Dビューワ画面およびカメラ映像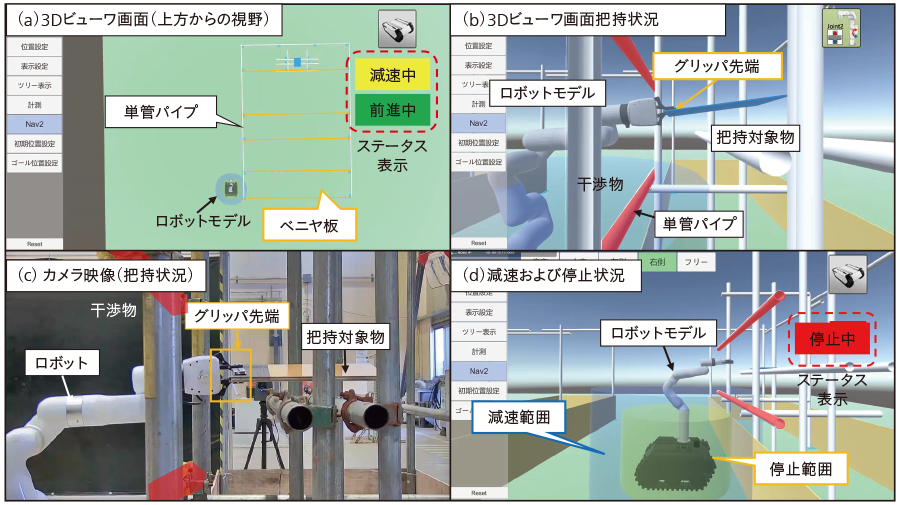 (a)に示す画面上では,上方からモックアップ全体を確認できる。(b)は,3Dビューワを見ながらロボットが単管パイプを回避した様子を示す。(c)は(b)の時点での実機の様子を示す。同時刻に(b)と同様の位置・姿勢であったことが分かる。(d)は3Dモデル同様に実機クローラも減速範囲内に周囲機器が近付くと減速し,停止範囲内に周囲モデルが接触すると停止することを示す。
(a)に示す画面上では,上方からモックアップ全体を確認できる。(b)は,3Dビューワを見ながらロボットが単管パイプを回避した様子を示す。(c)は(b)の時点での実機の様子を示す。同時刻に(b)と同様の位置・姿勢であったことが分かる。(d)は3Dモデル同様に実機クローラも減速範囲内に周囲機器が近付くと減速し,停止範囲内に周囲モデルが接触すると停止することを示す。
4. おわりに
日立プラントコンストラクションは,遠隔化施工の安全性確保を目的として,遠隔操作の視覚支援が可能な3Dデジタルツインシステムを開発した。本システムは汎用性が高く,対象とする遠隔装置の各所にセンサーを取り付け,ネットワークを介して仮想空間上で遠隔装置の挙動や位置情報をリアルタイムに連動して把握できる。その効果として,遠隔化施工の安全性の確保やスキルレスな遠隔操作が期待できる。
今後,汎用的な本システムを重機に組み込んだ遠隔作業に適用予定である。また,これらのデジタル技術を応用して顧客と新たなソリューションを協創し,今後の安全な遠隔化施工の実現に貢献していく。
参考文献など
- 1)
- 清水建設株式会社:建築工事現場で最先端技術を搭載したロボットと人がコラボ~次世代型生産システム「シミズ スマート サイト」~
- 2)
- 大成建設株式会社:臨場型遠隔映像システム「T-iROBO Remote Viewer」を開発
- 3)
- 東京電力ホールディングス株式会社:福島第一原子力発電所 1号機原子炉建屋Xブレース撤去(切断)作業の開始について
- 4)
- 東京電力ホールディングス株式会社「2020/10/29(木)福島第一原子力発電所 1号機燃料取扱機 支保設置作業の完了について」(動画アーカイブ)
- 5)
- 東京電力ホールディングス株式会社「福島第一原子力発電所 1号機燃料取扱機 支保設置作業の完了について」(画像)



