1.広域監視・警備ソリューション
1.社会インフラ全般にわたるセキュリティソリューション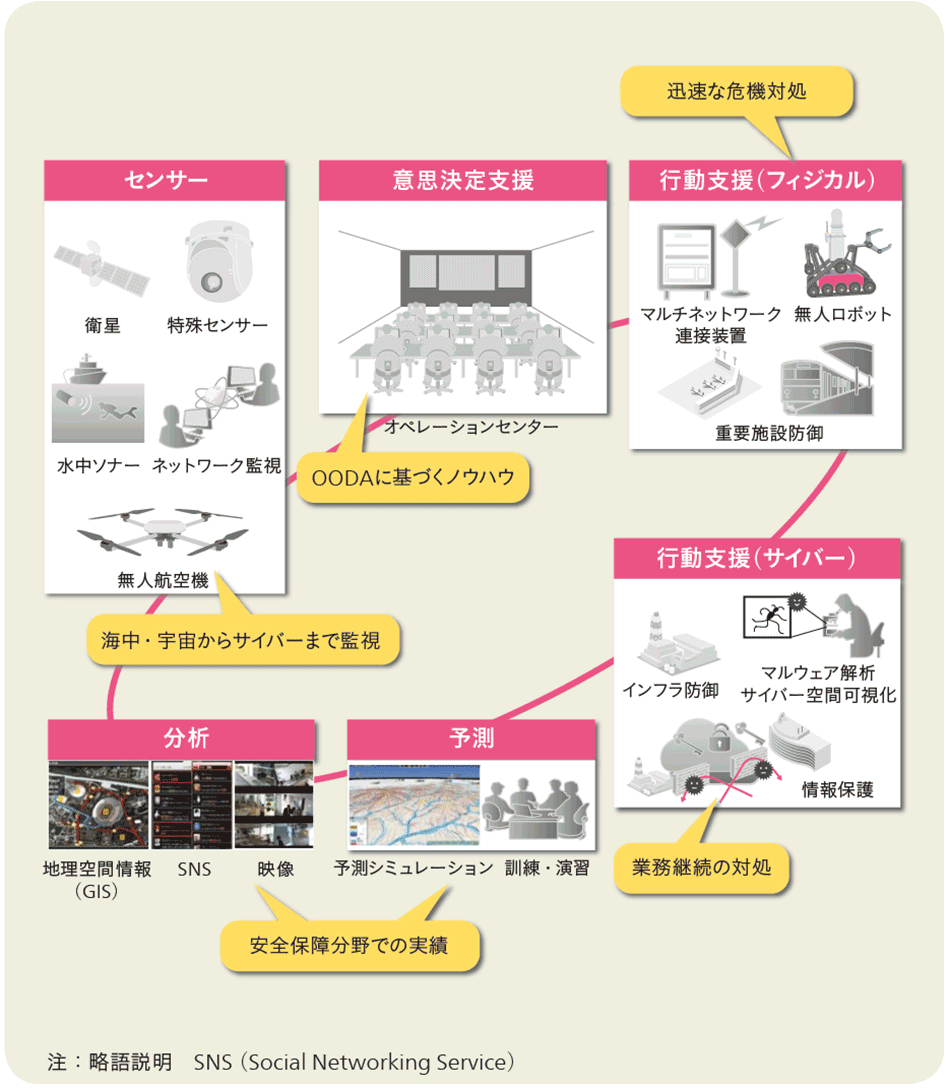
日立は,街区,交通機関,重要防護施設などの社会インフラを自然災害やサイバー攻撃,テロなどの脅威から守るために必要なセキュリティ要件を,Adaptive(適応性),Responsive(即応性),Cooperative(協調性)に焦点を当てたH-ARCコンセプトとして整理し,危機管理に関するISO(International Organization for Standardization)22320に沿った適切な対策を継続的に行う広域監視・警備ソリューションを提供している。
具体的には,物理空間とサイバー空間の両面で時々刻々と変化する状況を把握するため,衛星や無人航空機,ネットワーク監視などのセンサーにより,社会インフラを多元的に監視する。無人機やセキュリティゲートなどで物理面からの行動支援を行いながら,それらの情報をGIS(Geographic Information System)や画像解析,シミュレーション技術などによって分析・予測し,OODA[Observe(監視),Orient(分析),Decide(判断),Act(行動)]プロセスに基づくノウハウ提供も含めて,迅速・的確な意思決定を支援していく。
また,大量に収集した監視情報のリアルタイム処理によって異常の予兆を自動検知し,迅速な対処をサポートする。システム導入時は,運用形態や既存設備に合わせて機器構成を柔軟に選択することで,短期間でのシステム構築を実現する。