
原子力分野における日立の取り組み福島第一原子力発電所の廃炉に向けたロボット技術開発と実機適用
執筆者
岡田 聡Okada Satoshi
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
平野 克彦Hirano Katsuhiko
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
小林 亮介Kobayashi Ryosuke
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
米谷 豊Kometani Yutaka
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
執筆者の詳細を見る
岡田 聡Okada Satoshi

- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島廃止措置向けの調査技術の開発に従事
- 博士(情報科学)
- 日本ロボット学会会員
- 日本機械学会会員
- 電気学会会員
- 日本原子力学会会員
平野 克彦Hirano Katsuhiko

- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島廃止措置向けの燃料デブリ取り出し技術の開発に従事
- 技術士(機械,総合技術監理)
- 日本材料学会会員
- 日本原子力学会会員
小林 亮介Kobayashi Ryosuke
- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島廃止措置向けの燃料デブリ取り出し技術の開発に従事
- 日本ロボット学会会員
- 日本原子力学会会員
- 日本船舶海洋工学会会員
米谷 豊Kometani Yutaka

- 日立GEニュークリア・エナジー株式会社 原子力生産本部 福島・廃止措置エンジニアリングセンタ 所属
- 現在,福島廃止措置向けの技術開発の取りまとめ業務に従事
- 技術士(機械)
ハイライト
東日本大震災に伴う福島第一原子力発電所の事故を受け,日立グループは,発電所構内の除染作業,環境整備,燃料デブリ取り出しに向けた各種調査について,必要な機器の開発を進めてきた。
本稿では,作業用ロボットとして重作業を行うための双腕重機ロボット「ASTACO-SoRa」,高放射線環境対応の柔構造アーム「筋肉ロボット」,調査用ロボットとして,原子炉格納容器内部調査用の形状変化型ロボット「PMORPH」,水中環境であるトーラス室内調査用の「げんごROV」,「トライダイバー」,さらに原子炉格納容器内部の水中部分を調査する潜水機能付きボートについて,適用実績を含めて解説する。また今後,活用を計画している次世代ロボット技術として,高放射線環境対応ロボットの操作支援技術,調査・監視向けドローンについても紹介する。
1. はじめに
福島第一原子力発電所の廃止措置では,高い放射線環境下での作業のため,遠隔操作可能な調査用ロボット,除染やがれきの撤去を行う作業用ロボットなどの装置が必要である。これに対し日立グループでは,各種ロボットを開発し,現場適用を進めてきた。
本稿では,これまでに開発してきた作業用ロボット,調査用ロボット,さらには次世代のロボット技術について,開発実績と実機適用状況を解説する。
2. 作業用ロボット
作業用ロボットは,一般にがれきの撤去や除染作業などに使用する装置のことであるが,これに加え,福島第一原子力発電所の廃止措置では,高い放射線環境下で動作するロボットが必要となる。本章では,小型で重作業を実施可能な双腕重機ロボットと,高放射線環境下で燃料デブリの取り出し作業を行う柔構造アームについて解説する。
2.1 双腕重機ロボット「ASTACO-SoRa」
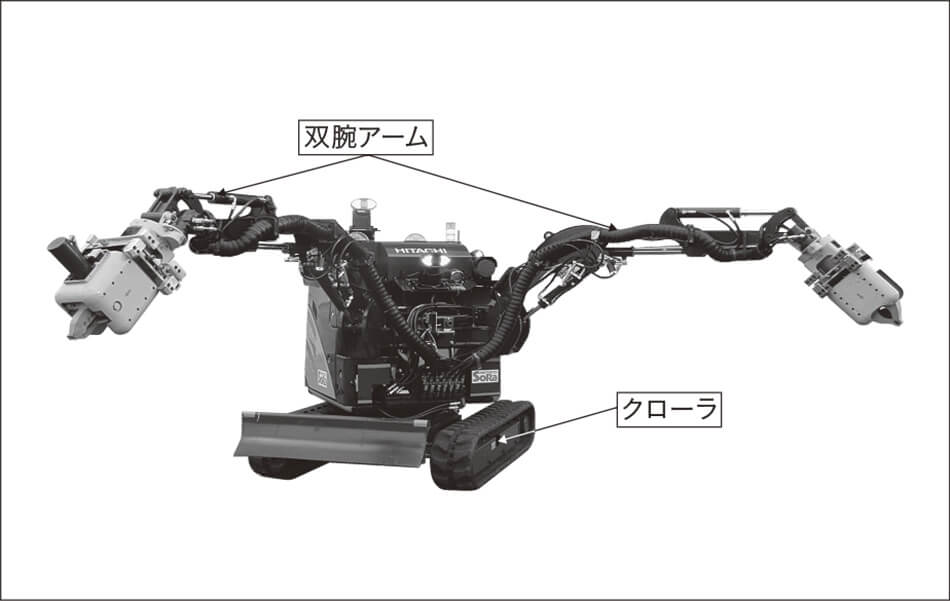
遠隔操作ロボットのニーズに応えるべく,日立グループでは,原子力災害対応用小型双腕重機型ロボット「ASTACO-SoRa」を開発し1),適用を進めている。図1にロボット,図2に遠隔操作盤の外観を示す。このロボットは,幅980 mmのコンパクトなボディに2本のアームを搭載することにより,建屋内での自由度の高い作業を可能とした。また,2本のアームは高さ約2.5 mまで到達でき,アーム1本当たり150 kg,両アームで合計300 kgの重量を持ち上げることができる。さらに,2本のアームの先端には,つかみ具,切断具,回転具,カメラ付き長尺アームを着脱することが可能であり,広範な作業に対応している。運転は遠隔操作盤から無線にて行い,その際,ロボットに搭載した6台のカメラ映像を切り替えることで,同時に五つのモニタで視認しながら操作できる。また,6台のカメラにはそれぞれLED(Light-emitting Diode)照明を搭載しており,暗闇となる原子炉建屋内でのがれき撤去作業などへ対応可能とした。ASTACO-SoRaの開発により,福島第一原子力発電所の原子炉建屋内における高放射線環境でもコンクリート片などのがれき除去を遠隔操作で行うことが可能となった。
図1|双腕重機ロボット「ASTACO-SoRa」の外観アーム先端のツールを遠隔で交換することが可能であり,建屋内でのさまざまな重作業へ対応できる。
図2|双腕重機ロボット「ASTACO-SoRa」の遠隔操作盤の外観 ジョイスティックによるクローラとアームの操作,ロボット搭載カメラやセンサーの情報をリアルタイムで確認できる。
ジョイスティックによるクローラとアームの操作,ロボット搭載カメラやセンサーの情報をリアルタイムで確認できる。
2.2 高放射線環境対応の柔構造アーム「筋肉ロボット」
一般的な遠隔操作ロボットを燃料デブリ取り出しに使用する場合,高い放射線環境下では搭載する電子機器の劣化により稼働時間が制限される,見通しの悪い場所で衝突を回避する機能や技量が必要になるといった課題がある。これに対し,モータを使用せず水圧シリンダとバネまたは弾性構造から成るバネ系の組み合わせで構成され,対象物や周囲に衝突しても破損させない柔構造を実現し,耐放射線性の低いセンサー類を使用することなく制御可能な「筋肉ロボット」を開発した2)。
柔構造の要素(筋肉要素)と従来機器の組み合わせによりさまざまな装置構成が可能となる。代表的なタイプである4脚+単腕型筋肉ロボットの原子炉格納容器内での作業のモックアップ試験状況を図3に示す。上方の梁(はり)をつかんで任意の位置に移動し,単腕でさまざまなツールを持ち替えることで効率的に作業を行うことが可能である。
また図4に,原子炉圧力容器を支持する円筒構造物であるペデスタル内の落下物などを双腕型筋肉ロボットで除去するモックアップ試験の状況を示す。双腕型の場合,両腕で把持した状態で切断することで,切断片の落下を防ぎながら施工が可能となる。以上のように,筋肉ロボットは燃料デブリ取り出しのさまざまな場面での活躍が期待できる。
図3|4脚+単腕型筋肉ロボット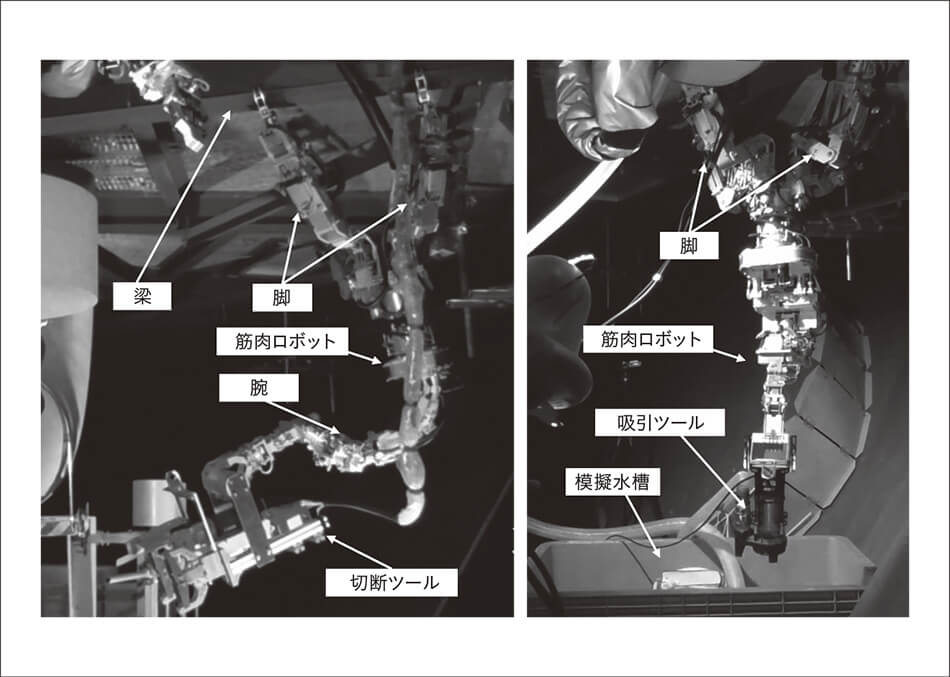 移動用の4脚でグレーチング支持梁(はり)を把持し,任意の位置で施工を実施することが可能である。単腕は先端のツールを用途に応じて取り替えることでさまざまな作業を実施することが可能である。左側の写真は切断ツールで干渉物の撤去作業を実施しているものである。右側の写真は吸引ポンプを設置するところである。
移動用の4脚でグレーチング支持梁(はり)を把持し,任意の位置で施工を実施することが可能である。単腕は先端のツールを用途に応じて取り替えることでさまざまな作業を実施することが可能である。左側の写真は切断ツールで干渉物の撤去作業を実施しているものである。右側の写真は吸引ポンプを設置するところである。
図4|双腕型筋肉ロボット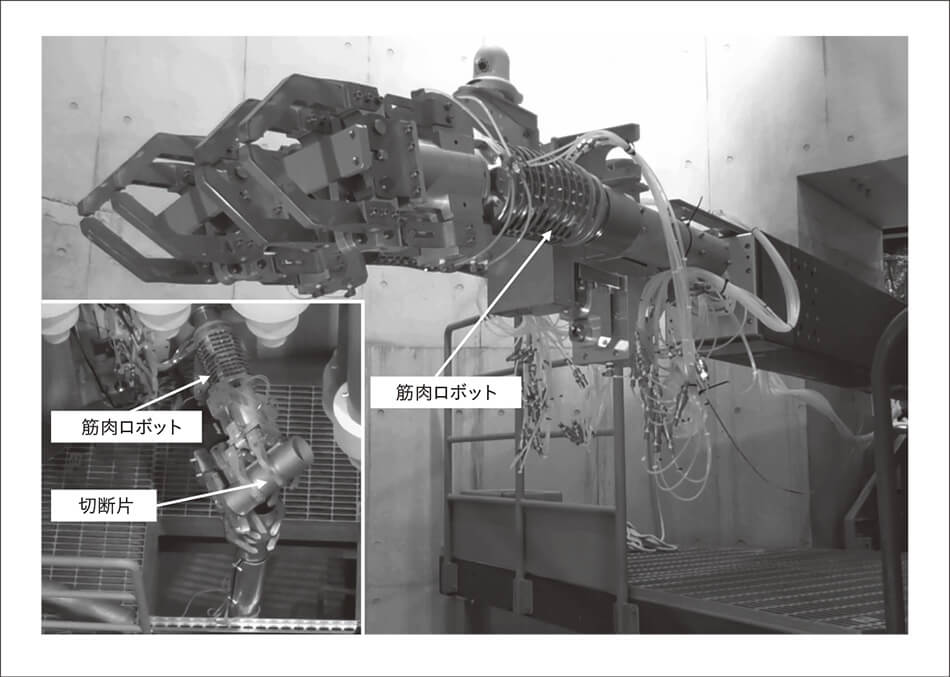 このロボットは,2本の柔構造アームを備えたタイプである。左下の写真のように両腕で対象物を把持し,切断する。その後,把持した一方を撤去することを繰り返して撤去作業などを進めることが可能である。
このロボットは,2本の柔構造アームを備えたタイプである。左下の写真のように両腕で対象物を把持し,切断する。その後,把持した一方を撤去することを繰り返して撤去作業などを進めることが可能である。
3. 調査用ロボット
3.1 形状変化型ロボット「PMORPH」
2015年4月に実施した,福島第一原子力発電所1号機PCV(Primary Containment Vessel)内の1階グレーチング上調査(B1調査)に用いた,日立の形状変化型ロボット「PMORPH1」の外観を図5に示す3)。PMORPH1は,二つのクローラの中間に,調査用のカメラを搭載している。このカメラは,コ型の状態で前方を向き,また,上下のチルト機構によりPCV内の構造物の状態を目視にて調査可能である。また,グレーチング上の環境を調査するため,放射線線量計と温度計を搭載している。PMORPH1を用いた調査の結果,線量率や温度の分布が把握できたとともに,既設構造物に大きな破損がないことが分かった4)。
図6に,2017年3月に実施した1号機PCV内の地下階調査(B2調査)に用いた,PMORPH2の外観を示す。PMORPH2は,PMORPH1の調査用カメラに代えて地下階にセンサーユニットを降下させるためのウインチを搭載している。また,センサーユニットにはカメラと線量計を搭載した。調査の結果,地下の落下物や堆積物の状況が把握できたとともに,床面に近づくほど線量率が高くなることが明らかとなった5)。
図5|PMORPH1の外観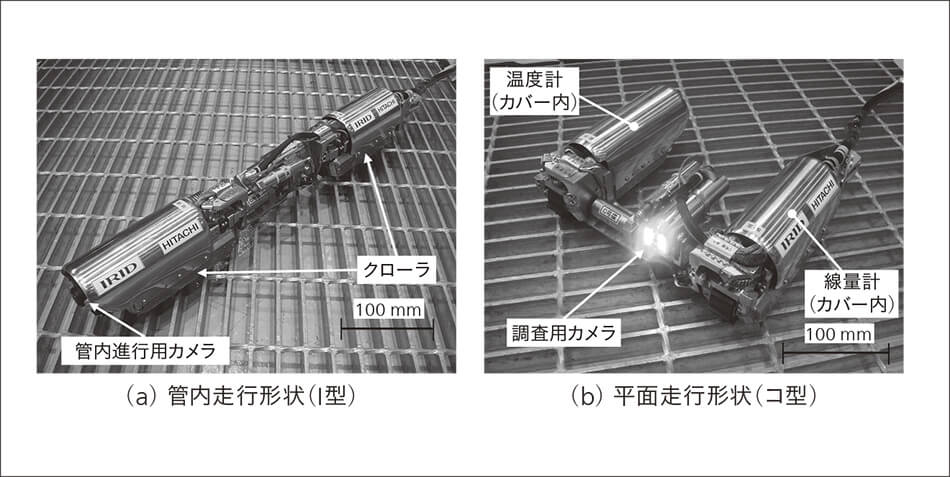 本装置は管内走行時と平面走行時の形状を変更することで,異なる環境条件においても同一装置で安定走行を可能としている。(a)は管内通過時の形状,(b)はグレーチング上を走行し調査を実施する時の形状である。
本装置は管内走行時と平面走行時の形状を変更することで,異なる環境条件においても同一装置で安定走行を可能としている。(a)は管内通過時の形状,(b)はグレーチング上を走行し調査を実施する時の形状である。
図6|PMORPH2の外観 PMORPH1の移動機構へセンサーユニットを備えたウインチ機構を搭載し,調査範囲を拡大した。
PMORPH1の移動機構へセンサーユニットを備えたウインチ機構を搭載し,調査範囲を拡大した。
3.2 水中ROV「げんごROV」,「トライダイバー」
原子炉建屋のトーラス室水中壁面貫通部の漏洩(えい)を確認するために,当該部へのアクセス性と漏洩確認手段を備えた水中ROV(Remotely Operated Vehicle)「げんごROV」を開発し,目視調査を実施した6)。図7にロボットの外観を示す。げんごROVはスラスタ5台(前後進用2台,昇降用1台,左右移動用2台)を備え,前後にパン・チルト・ズームカメラを搭載し,水中で対象部位の観察が可能な装置である。また,走行機能を持った水中ROV「トライダイバー」を用いてトーラス室水中壁面調査を実施した。図8に,ロボットの概要を示す。トライダイバーはクローラ機構および上下移動用スラスタ4台,水平方向移動用スラスタ2台を備え,水中カメラの他調査デバイスである超音波ソナーを搭載し,光学的に検知が困難な流れも検出可能な仕様とした。現地調査の結果,トライダイバーから3 m離れた貫通部の形状確認ができることを確認した。
図7|水中ROV「げんごROV」の外観 複数の推進器(スラスタ)により水中を三次元移動できる。ロボット単体を用いてカメラによる目視調査,他のロボットの移動・作業支援も可能である。
複数の推進器(スラスタ)により水中を三次元移動できる。ロボット単体を用いてカメラによる目視調査,他のロボットの移動・作業支援も可能である。
図8|水中ROV「トライダイバー」の外観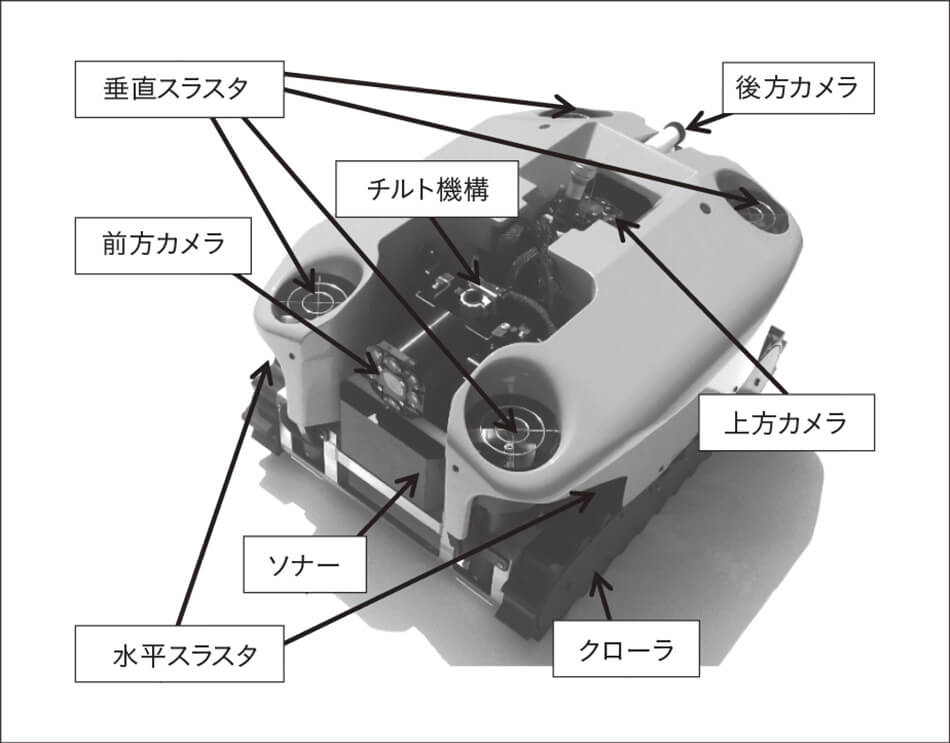 クローラとスラスタを備えることで,遊泳移動,水底走行,壁面走行が可能である。
クローラとスラスタを備えることで,遊泳移動,水底走行,壁面走行が可能である。
3.3 潜水機能付きボート
図9|潜水機能付きボート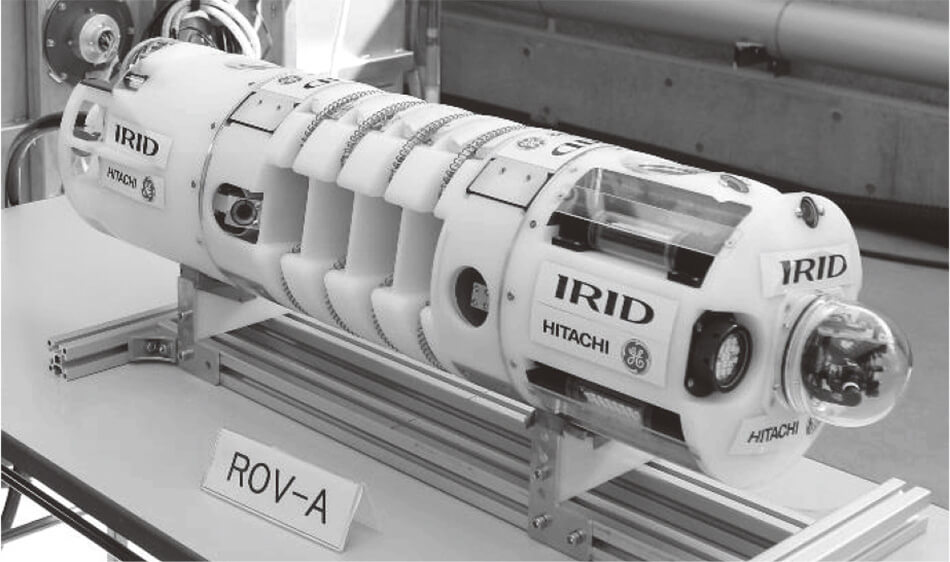 機能の異なる6種類の潜水機能付きボートを開発した。写真は水中の金属部に円環のガイドを取り付け,ボートのケーブルをガイドするタイプである。他のボートは,底部の形状,放射線分布などを計測する機能を有する。
機能の異なる6種類の潜水機能付きボートを開発した。写真は水中の金属部に円環のガイドを取り付け,ボートのケーブルをガイドするタイプである。他のボートは,底部の形状,放射線分布などを計測する機能を有する。
PCVの下部や原子炉建屋の地下階には,事故により燃料冷却水や地下水が滞留しており,各調査箇所や目的に応じた装置が開発され活用された。水中作業用のロボットのうち,状況確認をしながら調査をするには,ROVが適している。そこで,PCV内地下階のペデスタル外部を調査するため,潜水機能付きボートを開発した7)。今回開発したROVは,潜水機能付きボート5種類と小型ボート1種類の合計6種類であり,図9に示すボートは,ボートのケーブルが既設設備に絡まることを防ぐためにガイドリングを地下構造物に磁力で取り付ける機能を有する。他に,堆積物3Dマッピング,堆積物厚さ測定,中性子束測定,堆積物サンプリングの各機能に合わせてセンサー類を搭載した計測用ボートの4種類と,広域を目視することが可能な小型ボートを開発した。
4. 次世代ロボット技術
4.1 遠隔作業ロボット操作支援技術
図10|センサレスロボットの操作支援システム構成例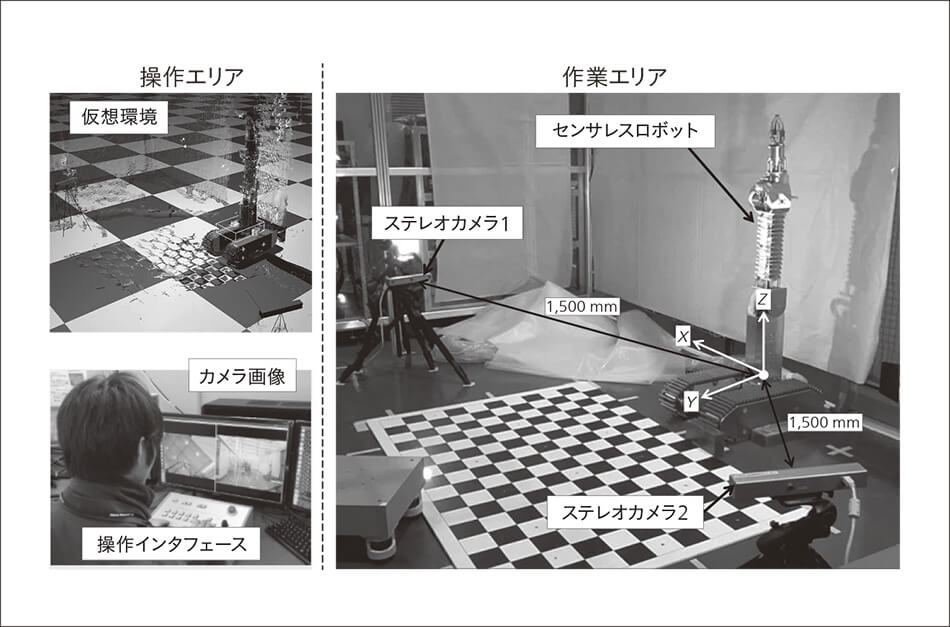 本構成はステレオカメラ2台を環境へ固定しているが,移動ロボット搭載カメラや2台以上のステレオカメラを用いても同様の支援機能を実現できる。
本構成はステレオカメラ2台を環境へ固定しているが,移動ロボット搭載カメラや2台以上のステレオカメラを用いても同様の支援機能を実現できる。
作業ロボットは,作業エリアから離れた放射線量が低いエリアからオペレータが遠隔操作する必要があり,オペレータが直接ロボットを目視確認せずに作業を進めなければならない。そのため,リアルタイムな作業ロボットの操作・監視を支援するシステムが求められる。しかしながら,ロボット自身に姿勢計測センサーを搭載してロボットを監視する一般的な遠隔操作システムは,耐放射線性の観点で直接適用することが困難である。
そこで,作業ロボット本体からセンサーを分離し,外部に設置したセンサーからの情報を利用してロボットを操作・監視する遠隔操作システムを開発した8)。図10に,開発した遠隔操作支援システムの構成例を示す。作業エリアには,搭載センサーがない(センサレス)ロボットとステレオカメラを設置し,操作エリアの制御装置内でステレオカメラ画像を基にロボットの状態を推定する。推定結果を仮想環境上でオペレータへ提示することで,カメラ画像のみでは把握できない作業環境の三次元形状や配置を確認でき,作業対象物へのアクセスや周辺構造物との干渉回避の操作支援を実現する。
4.2 調査・監視向けドローン
図11|試作ドローンの外観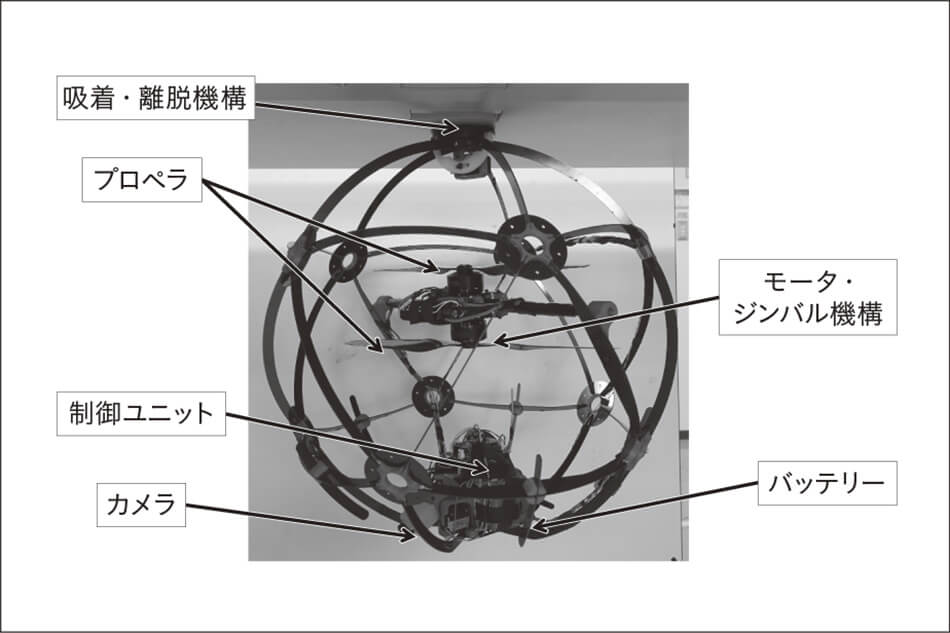 推力は2重反転プロペラ方式とし,姿勢制御は2重反転プロペラをピッチ・ロールに傾け行う方式としている。方位の制御は上下のプロペラの回転数を変化させ,上下のプロペラの反トルクの合計値を制御することにより行う。
推力は2重反転プロペラ方式とし,姿勢制御は2重反転プロペラをピッチ・ロールに傾け行う方式としている。方位の制御は上下のプロペラの回転数を変化させ,上下のプロペラの反トルクの合計値を制御することにより行う。
地上を走行するクローラなどのロボットでは走破することが難しい環境の調査や作業ロボットの監視のために,周囲との接触を許容可能な球状外殻を備え,屋内の狭隘(あい)な環境でも飛行できる小型ドローンを開発した9)。図11に外観を示す。開発したドローンは,鉄製構造物への吸着・離脱機構を有しており,ホバリングによる消費電力を低減し,長時間稼働を可能とした。また,重心を球の中心よりも下方に配置することにより,どのような姿勢で着陸しても再離陸可能な姿勢に移行可能とした。試作機を用いて,天井への吸着と離脱,構造物に張り付いての周囲確認,広範囲の画像取得が可能であることを実証し,遠隔作業において死角を補う移動式定点カメラとして活用できることを確認した。
5. おわりに
本稿では,日立が開発した福島第一原子力発電所の廃止措置に向けた各種遠隔ロボットと,次世代ロボット技術について解説した。これらのロボットにより,廃止措置推進に寄与することができたと考えている。今後も,長期にわたる廃止措置事業を進めるため,技術開発を進める計画である。
謝辞
本稿で述べた装置は,日立グループのロボット技術を活用し開発したものである。そのうち,水中ROV「げんごROV」,水中ROV「トライダイバー」,格納容器内調査用の形状変化型ロボット「PMORPH」,潜水機能付きボートは,資源エネルギー庁の補助事業である平成24年度発電用原子炉等事故対応関連技術開発費補助金,平成25年度発電用原子炉等廃炉・安全技術開発費補助金,平成25~30年度補正予算「廃炉・汚染水対策事業費補助金」など,「ペデスタル内作業用の双腕型筋肉ロボット」は,平成28年度補正予算「廃炉・汚染水対策事業費補助金」により,技術研究組合国際廃炉研究開発機構の事業として開発したものである。また,小型双腕重機型ロボット「ASTACO-SoRa」の開発にあたっては,2006年~2010年度に実施されたNEDO(New Energy and Industrial Technology Development Organization)委託事業「戦略的先端ロボット要素技術開発プロジェクト」により培われた技術的なノウハウが活用されており,関係各位に深く感謝の意を表するものである。
参考文献など
- 1)
- 日立GEニュークリア・エナジー株式会社,原子力災害対応用小型双腕重機型ロボット『ASTACO-SoRa』を開発(2012.12)
- 2)
- 平野克彦,外:筋肉ロボット,日本ロボット学会誌,Vol.36,No.6,p.408~411(2018.7)
- 3)
- 岡田聡,外:原子炉格納容器内部調査装置の開発:形状変化型ロボット「PMORPH(ピーモルフ)」(ロボット技術とAI(人工知能)の動向),電気評論,Vol.641,No.102(夏季増刊号),p.27~31(2017.6)
- 4)
- 東京電力ホールディングス株式会社,ペデスタル外側_1階グレーチング上調査(B1調査)の現地実証試験の結果について(2015.4)(PDF形式、2.7Mバイト)
- 5)
- 東京電力ホールディングス株式会社,1号機原子炉格納容器内部調査について(2017.3)(PDF形式、2.9Mバイト)
- 6)
- IRID,福島第一原子力発電所 建屋内で活躍するロボットについて(その3)水中遊泳ロボット(げんごROV)&床面走行ロボット(トライダイバー)~ロボットが撮影した2号機のトーラス室(水中)の内部映像~
- 7)
- 日立GEニュークリア・エナジー株式会社,福島第一原子力発電所1号機の原子炉格納容器内部詳細調査用潜水機能付ボート型アクセス調査装置を開発(2019.3)
- 8)
- Hitachi-GE Nuclear Energy, Ltd. et al.: Manipulator Pose Estimation System Using Stereo Camera for Decommissioning Work, E-Journal of Advanced Maintenance, vol.11, No.1, NT93 (2019.5)
- 9)
- Hitachi-GE Nuclear Energy, Ltd. et al.: Development of a MAV Equipped with Rotatable Attachment Mechanism for Movable Observation System, E-Journal of Advanced Maintenance, vol.10, No.3, NT91(2018.11)



