「つながるクルマ」で実現する自動運転技術
社会課題に応える技術として自動運転が期待されている。
高速道路から,より環境が複雑となる一般道への走行領域拡大に向け,日立は技術開発を加速させている。
本稿では,ダイナミックマップ,モデル予測制御,AI実装技術の取り組み例,今後の展望について述べる。






クルマ社会において,交通事故およびその死傷者数の低減は重要な課題の一つであり,運転を支援する予防安全技術や運転手の機能を代替する自動運転技術の研究開発が活発に行われている。高度な運転支援や自動運転を実現するためには,自車の走行環境を認識するセンシング技術,認識した環境下で安全に車両の走行を制御する認知・判断技術が重要であり,さらに,これらにAI(Artificial Intelligence)技術を導入することで,より複雑な環境下での走行を可能とする。本稿では,自動運転の高度化を支える認知・判断技術とAI適用技術に関する日立グループの取り組みを紹介する。
自動運転は,認識,認知,判断・制御により実現される(図1参照)。認識ではステレオカメラやレーダーなどのセンサーにより物体を認識する。認知は,各センサーからの認識情報(車両,歩行者,標識,路面標示など)を統合するセンサーフュージョン,自車位置を推定する高精度位置推定,認識オブジェクトと地図を統合する地図フュージョン,自車周辺の移動体の行動を予測する立体物行動予測,およびこれらの情報を判断・制御向けのデータ表現として経路・空間マップやリスクマップを作成するダイナミックマップ生成により構成される。
判断・制御は,運転行動計画,軌道候補生成,軌道評価および軌道追従制御で構成する。運転行動計画では,自動運転全体の状態管理と,中長距離のレーンレベルでのおおまかな運転行動(走行レーン選択など)の生成を行う。軌道候補生成では,車両の運動特性などに基づき軌道候補を生成する。軌道評価では,軌道候補に対して将来リスクを考慮し,最適な軌道を選択する。軌道追従制御では,車両が目標軌道を追従するようにアクチュエータへの制御指令値を計算する。
図1|自動運転システムの構成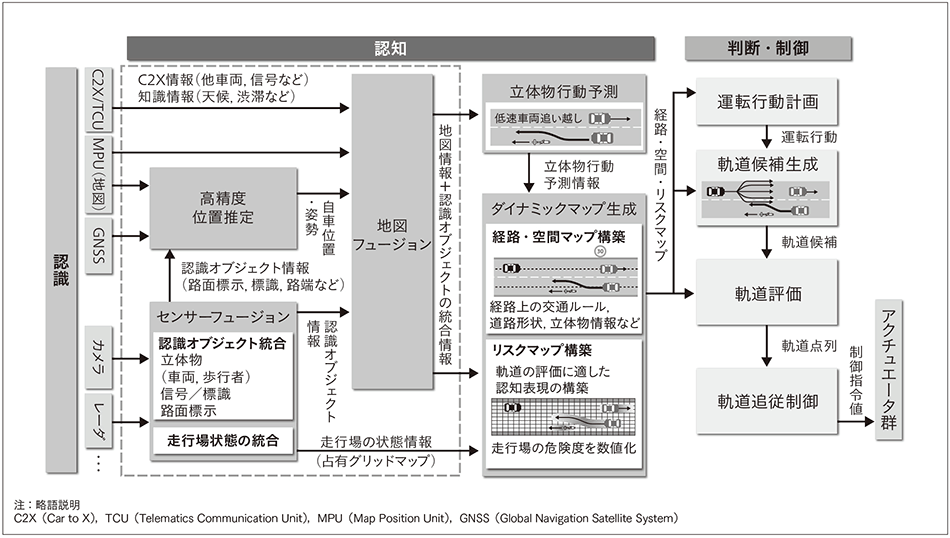 自動運転は,認識,認知,判断・制御により実現される。
自動運転は,認識,認知,判断・制御により実現される。
今後,自動運転適用シーンが一般道へ拡大し,またその自動運転のレベルもレベル4やレベル5へ進化していくためには,従来のルールベース制御では対応が困難な場合があり,深層学習やモデル予測制御といった新たな知能化技術の導入が必要となる。近年の技術革新により,深層学習による画像処理において人間を上回る認識・識別や周辺車両などの移動予測を実現できるようになってきている。また,自車の経路パターン生成において,モデル予測制御を適用することにより周辺物体の移動予測などを考慮でき,ルールベースでの設計に対してより適切な経路を生成することが可能となる。
これらの演算は従来に比べて計算量が増加する傾向にあるが,組み込みシステムとして演算を実現するデバイスが登場し,自動運転車への適用が開始されている。ただし,深層学習のアルゴリズムは多数の方式が存在するため,実用化に向けて適切な方式選択と計算規模の縮約が求められる。これらの技術は研究開発フェーズであるが,自動運転のキー技術になると予想されている。
自動運転車においては,センサーや地図に基づいて周辺の走行環境(例:他車両,交差点など)を高精度に認知し,自動運転の判断(制御)部に提供することが求められる。代表的な従来方式として,先進運転支援システム(ADAS:Advanced Driver Assistance Systems)向けの業界標準となっている先進運転支援システムインタフェース仕様(ADASIS:Advanced Driver Assistance Systems Interface Specification)規格がある。この規格では,自車の走行予定の道路(走行経路)に沿って,周辺環境情報の相対位置を表現するため(例:30 m先に交差点),車間距離制御(ACC:Adaptive Cruise Control)のような前後方向の走行制御の開発に適している。しかし,現時点においては車線レベルの詳細な形状表現を対象としておらず,操舵(だ)制御を含む自動運転に適用できないという課題がある。一方で,車線レベルの詳細な情報はデータ量が多くなるので,計算能力や記憶容量に制約があるECU(Electronic Control Unit)上での制御を可能とするためには,効率的で扱いやすいデータ表現が必要である。
そこで,自動運転に必要な車線レベルの詳細な周辺環境情報を効率的かつ柔軟に提供可能とする階層型ハイブリッドデータ表現方式を開発した。この方式の主な特徴は以下の2点である(図2参照)。
(1)により,すでに広く製品に適用されているADASIS規格をレイヤー1としてそのまま採用し,自動運転向けに必要な拡張表現を別階層(レイヤー2)で実現することにより,ADASISを用いた従来製品との互換性を担保しつつ自動運転にも対応可能である。(2)においては,走行経路に沿った表現方式により,周辺環境をマクロに素早く把握できる一方で,空間上の相対位置表現により,ミクロに正確に把握することも可能である。両者を用途に応じて使い分けることで,自動運転を含めさまざまなADASアプリケーションの柔軟な開発が可能となる。
各座標表現の用途を考慮すると,走行経路に沿った相対位置座標では数キロメートルレベルの広範囲にわたる情報提供が必要となるのに対し,空間上の相対位置座標は,その用途に求められる精度から,数百メートルレベルの近傍でしか活用されることはない。その点に着目し,空間上の相対位置座標で表現された情報の提供範囲を近傍に限定することにより,自動運転の判断(制御)部に提供するデータ量を大幅に抑えることを可能とした。
図2|ADASISv2プロトコルを拡張したダイナミックマップの構造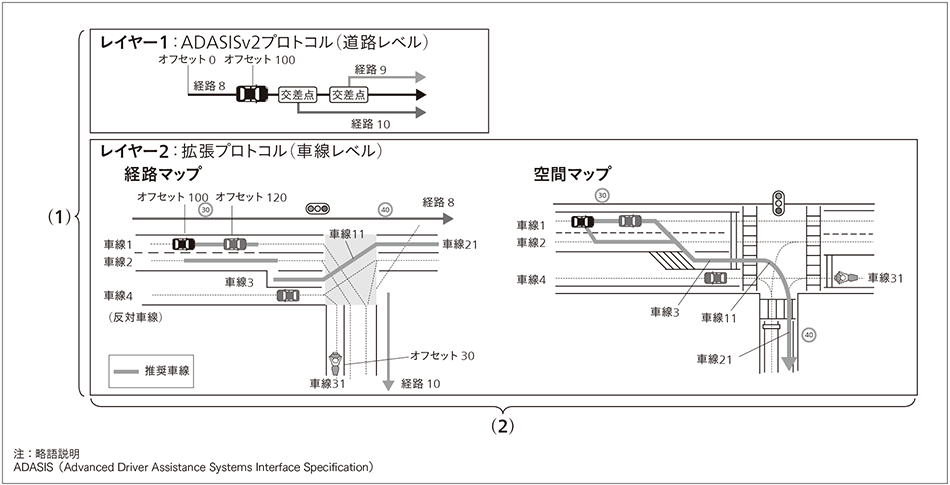 道路レベルの抽象表現(レイヤー1)と車線レベルの詳細表現(レイヤー2)の2階層構造としている(1)。周辺環境情報を「走行経路に沿った相対位置座標」と「空間上の相対位置座標」の2種類の座標系を採用している(2)。
道路レベルの抽象表現(レイヤー1)と車線レベルの詳細表現(レイヤー2)の2階層構造としている(1)。周辺環境情報を「走行経路に沿った相対位置座標」と「空間上の相対位置座標」の2種類の座標系を採用している(2)。
自動運転の適用範囲を高速道路から一般道に拡大するためには,歩行者や自転車などを認識するとともに,認識した車両や歩行者の動きを予測し,さらに,予測した対向車や歩行者の動きに基づいて,安心で快適な経路や速度で交差点を右左折するなど,高度な認知・判断技術が必要となる。
従来の手法では,例えば周辺オブジェクトの動きについて,走行環境の状況から考えられるパターンを列挙し,各パターンに対応して自車の動作を決定するなど,ルールベースのアルゴリズム開発が主に用いられてきた。しかし,そのような一般道を走行する際の周辺オブジェクトの想定パターンは膨大な数となり,すべてのパターンを漏れなく設計するのは困難である。そこで,日立では複雑な走行環境での自動運転実現に向け,AI技術を活用する検討を進めている。
AIには大きく3種類の技術があり,日立ではそれぞれを最適な用途に活用することを検討している(表1参照)。
1つ目はニューラルネットワークである。日立では,カメラ映像から周辺物体をより高精度に認識する技術の検討や,自車周辺の車両,歩行者の動きを事前に学習し,将来どのように動くかを予測する技術の検討を進めている。また,そのアルゴリズムの検討と並行して,生成されたネットワークを簡易化(縮約)する技術の検討も進めている。その内容については4.1節で詳説する。
2つ目はビッグデータ解析である。日立では独自の人工知能技術Hitachi AI Technology/H(以下,AT/Hと略す。)を保有している。AT/Hは,大量かつ複雑なデータの中から目標指標(KPI:Key Performance Indicator)との相関が強い要素を自動的に導き出すことが可能である。この技術を活用して,例えば,手動走行時の車両の動きと周辺状況をAT/Hで解析して自動運転時の車両制御に反映することで,人の操作により近い,安心・快適な自動運転の実現に向けた検討を進めている。
3つ目のAIはモデル予測制御である。その内容については4.2節で詳説する。
表1|日立がめざすAIの活用 AIには大きく3タイプがあり,適材適所の活用を検討している。
AIには大きく3タイプがあり,適材適所の活用を検討している。
図3|ニューラルネットワークの縮約技術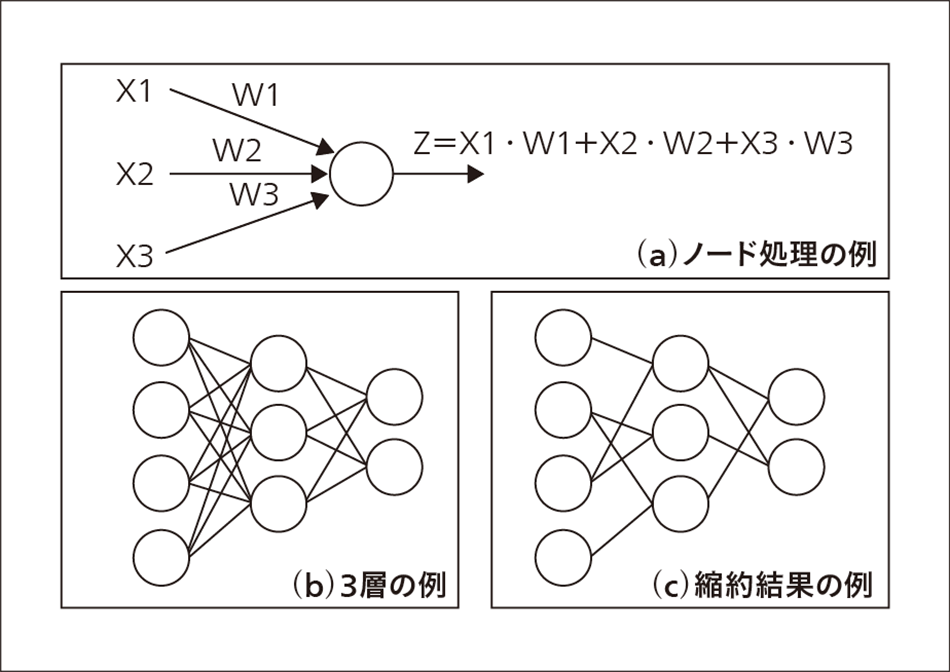 重み係数値の小さい演算を省略し,認識精度の維持と計算負荷の軽減を両立する。
重み係数値の小さい演算を省略し,認識精度の維持と計算負荷の軽減を両立する。
図3(a)にノードの処理を簡易的に表現した。同図にあるように,ノードでは入力信号[同図(a)のX1,X2,X3]に対して重み係数[同図(a)のW1,W2,W3]をそれぞれ乗算し,これらを加算した結果を出力する。同図(b)は上述のノードを用いた3層のニューラルネットワーク例である。同図に示すように,ニューラルネットワークの処理では各ノードにて多くの乗算・加算を行う必要があり,計算能力や記憶容量に制約があるECUでリアルタイム処理を行うのは困難である。
それらの課題に対し,日立では重み係数値が小さい場合に演算を省略することで,認識精度をできるだけ維持したまま処理負荷を軽減する縮約方式の検討を進めている。同図(c)は縮約後のネットワークの一例である。これにより,高精度な自動運転に向けて大規模なニューラルネットワークの処理が必要となった場合にも,効率的にECUに実装可能とすることをめざす。
モデル予測制御は,操作量uを入力とする制御対象の出力xを予測し,一定期間(t)内の制御性能を示す評価関数Hを最小化する操作量uを,最適化問題を用いて探索するものである。モデル予測制御を車両軌道生成に適用した例を図4に示す。この方式は,車両軌道候補生成,および評価関数演算から構成される。
車両軌道候補生成は,評価関数演算から出力される車両軌道の評価に基づき,最適化ソルバーを用いて最適な軌道を探索する。最適化ソルバーは,評価関数の微分値を用いる反復手法と,試行錯誤的に最適解を直接探索する発見的手法の2種類に大別される。反復手法は演算量が少ない反面,局所解に陥り真の最適解を発見できない可能性がある。一方,発見的手法は大域的な最適解を探索できるが,試行錯誤的な計算を行うため演算量が多くなる。しかし,近年の計算機の進展により,リアルタイム制御に必要な処理時間に収まる可能性が出てきた。そこで,この手法では発見的手法のうち,遺伝的アルゴリズム,粒子群最適化,人工蜂コロニーアルゴリズムを比較し,扱える変数量の多さ(スケーラビリティ),局所解問題の回避能力,処理速度,並列化の容易性を考慮し,人工蜂コロニーアルゴリズムを選択した。
評価関数演算では,車両軌道候補生成により出力された将来の車両位置候補x(k)(k=0,2,……, n)を入力し,評価関数Hにより軌道の最適度を評価する。評価関数Hは,動的障害物との衝突確率を表すH1と,乗り心地を評価するH2の2項から構成される。衝突確率項H1は立体物行動予測から出力されるリスクマップを自車領域S内で積分することにより求める。自動車の乗り心地は加速度,および加加速度が小さいほど良いとされるため,乗り心地を表すH2項は加速度,および加加速度の2乗を時間積分することにより求める。以上により,複数の動的障害物に囲まれた複雑な環境下において,衝突を回避し,かつ乗り心地のよい車両軌道を生成することが可能となる。
図4|モデル予測制御を用いた軌道生成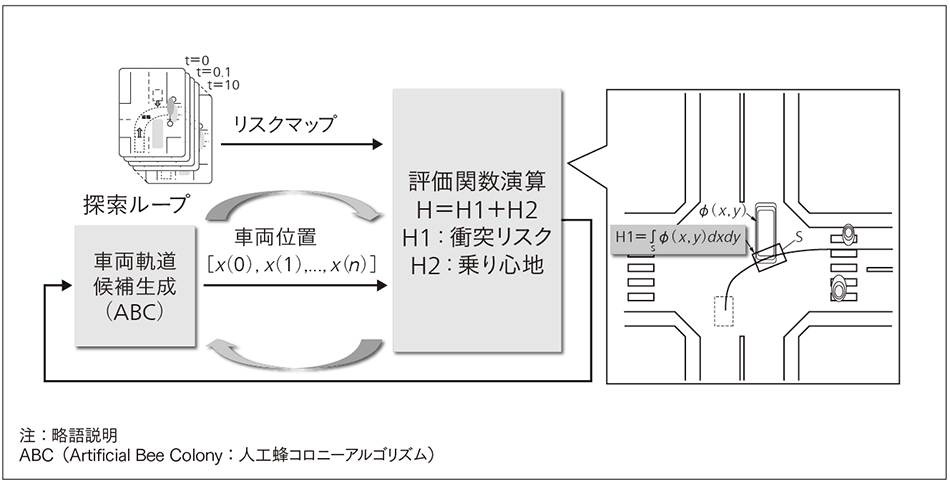 モデル予測制御を用いた軌道生成は,車両軌道候補生成,評価関数演算から構成される。
モデル予測制御を用いた軌道生成は,車両軌道候補生成,評価関数演算から構成される。
自動運転や運転支援の高度化,適用シーン拡大に加え,走行におけるシステムの安全性も高いレベルが要求される。評価・検証技術とともに本稿で述べた認知・判断,知能化技術を確立し,社会課題解決に向けた自動運転システムの早期実用化をめざし,取り組みを推進していく。
