実走行の燃費改善への要求から,エコドライブのように走行環境に応じてエンジン・変速機を制御するシステムが期待されている。日立では,自動運転・運転支援システムの外界認識技術により自車前方を先読みし,パワートレインの最適制御により実走行での燃費を改善する統合型パワートレイン制御システムを開発している。






地球環境問題の観点から,自動車のCO2排出量削減が要求され,特に実走行環境での燃費向上技術へのニーズが高まっている。実走行の燃費向上は,エンジン・変速機から成るパワートレインの高効率化に加えて,エコドライブ1),2)のように実走行環境に応じてパワートレインの動作を変更する走行制御によっても可能である。このためには,実走行環境を正確に把握することが重要となる。一方,交通事故件数削減や運転負荷低減など安全・快適の観点から,衝突回避,先行車追従やレーン逸脱防止などの高度な運転支援システムや自動運転を実現する技術開発が進められており,運転支援や自動運転システムでは,安全・快適な運転判断を行うために必要な走行環境を認識する技術が開発されている。
日立オートモティブシステムズ株式会社では,このような運転支援・自動運転に向けた認識・判断技術やパワートレインの高効率化のための技術と,これらを実現するための部品・サブシステムの開発を進めている。そして,運転支援・自動運転の認識・判断技術をパワートレイン制御に積極的に活用することで,燃費向上をねらった統合システム3),4)の開発を通して新たな付加価値の提案を進めている。
本稿では,このような自車前方の先読み・判断を行う自動運転・運転支援技術と車両の走行を直接制御するパワートレイン技術を統合し,実走行燃費を改善するシステムおよび技術について紹介するとともに,具体的に開発したシステム事例について述べる。
本章では,自動運転・運転支援技術とパワートレイン制御を統合して実走行環境での燃費を改善するためのシステムの構成とそれを支える技術について紹介し,このシステムによって燃費改善を実現する運転制御の概要について述べる。
図1に,統合システムの構成を示す。このシステムは,安全・快適を実現する自動運転・運転支援システムと,それにより認識された走行環境や決定された走行計画に基づいて車両を最適に制御するパワートレインシステムから構成され,これらを統合することで走行環境に応じて最適に運転を制御し,燃費改善を実現する。
図1|自動運転・運転支援とパワートレイン制御の統合システムの構成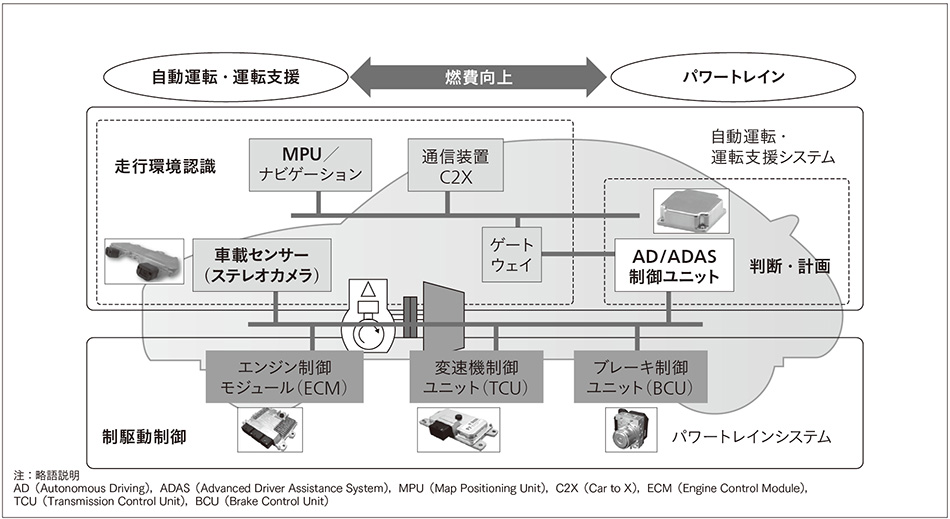 自動運転・運転支援システムの走行環境認識機能,認識結果に基づいた運転の判断・計画機能と,判断・計画機能に基づいた車両の制駆動制御を行うパワートレインシステムを統合化したシステムとなっている。
自動運転・運転支援システムの走行環境認識機能,認識結果に基づいた運転の判断・計画機能と,判断・計画機能に基づいた車両の制駆動制御を行うパワートレインシステムを統合化したシステムとなっている。
同図に示すように,自動運転・運転支援システムは,自車周辺の環境を認識する走行環境認識部分とその認識に基づいて走行計画を決定する判断・計画部分から成る。これら走行環境認識や判断・計画を実現するためのキー部品は,車載センサー,高精度自車位置検出装置,通信装置,自動運転・運転支援用コントロールユニットである。日立では,前方物体の認識と相対速度,相対距離など複数の情報を取得して走行環境を認識する車載センサーであるステレオカメラやミリ波レーダ,高精度な自車位置や詳細な道路情報を取得する高精度自車位置検出装置(MPU:Map Positioning Unit),さらに,先行車追従制御,車線維持制御,自動車線変更などの制御アプリケーションを実現するコントロールユニット(AD/ADAS-CU:Autonomous Driving/Advanced Driver Assistance System-Control Unit)をコア部品として開発している。
一方,パワートレインシステムは,車両の制駆動力を制御するエンジン・変速機から成る。エンジンを高精度に制御する各種部品とコントロールユニットであるエンジン制御モジュール(ECM:Engine Control Module),変速機の変速比やクラッチを自在に制御する変速機制御ユニット(TCU:Transmission Control Unit),さらに,減速度を同時に制御するブレーキ制御ユニット(BCU:Brake Control Unit)をコア部品として開発・製品化している。また,これら部品を用いて燃費向上を実現する高効率パワートレインシステムを開発している。
図2に,本稿の中心テーマである,燃費を改善するための統合機能の概要を示す。
図2|自動運転・運転支援技術とパワートレイン技術の統合機能の概要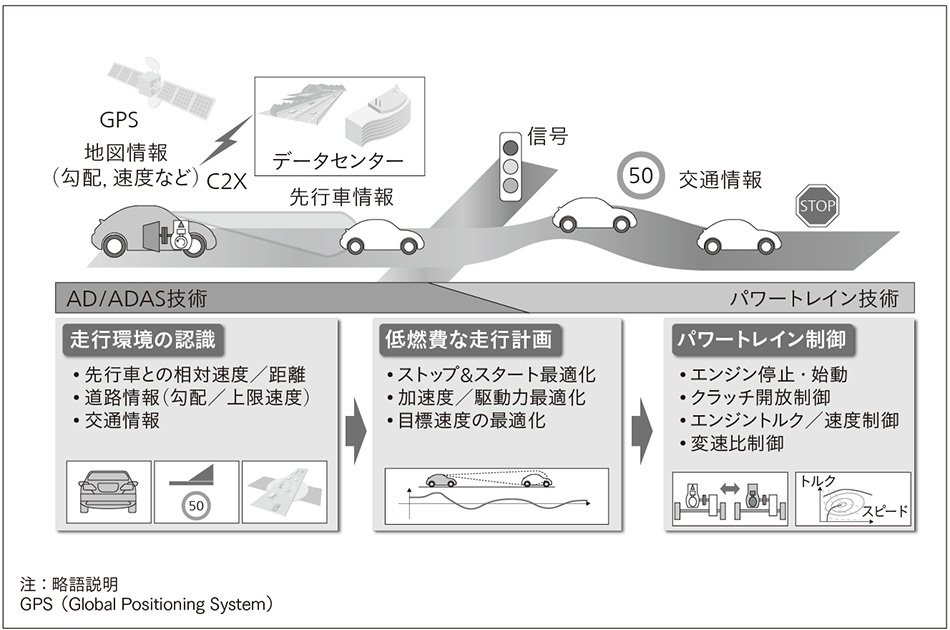 自動運転・運転支援の走行環境認識結果に基づき,低燃費な走行計画を策定し,走行計画に基づいてエンジン・変速機のパワートレイン運転制御を行い燃費改善を実現した。
自動運転・運転支援の走行環境認識結果に基づき,低燃費な走行計画を策定し,走行計画に基づいてエンジン・変速機のパワートレイン運転制御を行い燃費改善を実現した。
統合化したシステムでは,自動運転・運転支援に用いられるステレオカメラのような車載センサーによって相対距離・相対速度などの先行車情報を,MPUを用いて道路勾配や上限速度などの道路情報を,通信装置を用いて前方の交通情報などを取得し,走行環境の認識を行う。次に,これらの自車前方の情報を用いて先行車との関係や道路情報との関係から無駄な加・減速を抑制する設定や最適な車両速度設定,さらには,積極的にエンジン停止とクラッチ解放をさせる惰性(セーリングストップ)機能を用いた走行パターンなど,燃料消費を削減するための走行計画を策定する。
このように,エンジン制御モジュールと変速機制御ユニットの協調制御による最適加速度制御,エンジン停止・再始動によるセーリング制御,さらに,ブレーキ制御ユニットも協調させた加・減速制御を行い,低燃費な走行計画を実行する。
次に,燃費改善を実現する具体的なアプローチの例について述べる。
図3に,実走行時において燃費の改善が期待できる走行シーンとその際の運転制御の動作の例を示す。シーン1は,勾配路走行を判断し,下り勾配前の位置エネルギーや運動エネルギーを走行エネルギーに活用して,走行に必要なエネルギーを削減する。シーン2は,巡航走行状態を判断し,効率の良いエンジン動作点で走行することで燃費を改善する例である。シーン3とシーン4は,一般的にエコドライブ1),2)といわれる運転行動を模擬した例である。
図3|実走行における燃費改善の運転制御アプローチ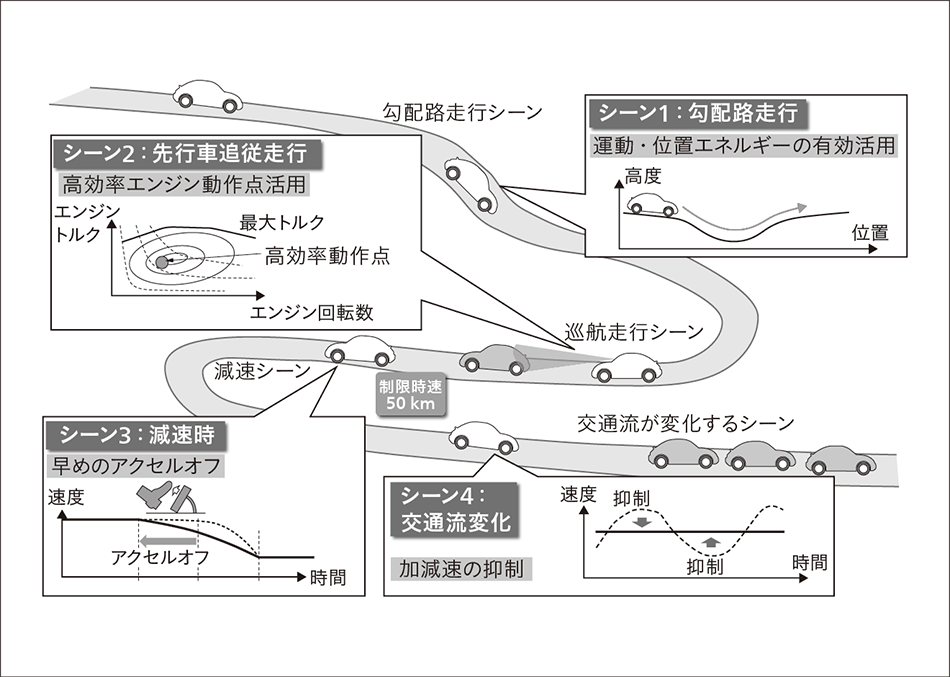 自車の走行シーンを判断し,そのシーンに適した省エネルギー運転を自動的に実現することで実走行時の燃費を改善する。
自車の走行シーンを判断し,そのシーンに適した省エネルギー運転を自動的に実現することで実走行時の燃費を改善する。
シーン3は,減速する際には,早めにアクセルをオフにすることで燃料消費を削減し,シーン4は,前方の交通流・交通密度に応じた走行制御により無駄な加減速を抑制して燃料消費を削減する。このように,各走行シーンに適した省エネルギー運転を実現することで,実走行時の燃費改善が可能となる。つまり,自動運転・運転支援システムの走行環境認識技術と省エネルギー運転を実現するパワートレイン制御の組み合わせによって実走行時の燃費を改善するシステムを実現できると考えている。
本章では,具体的な開発事例として,ステレオカメラを用いて先行車を認識し先行車追従するなどの巡航走行機能と,走行中にエンジンを停止して燃料消費を削減するパワートレイン制御(セーリングストップ)機能を統合したシステム3),4)について述べる。
開発システムの構成と制御ブロックの概要を図4に示す。本システムでは,自車前方情報として,ステレオカメラから先行車との相対距離・速度を,地図情報から勾配・上限速度および距離を取得し,速度制御・先行車追従制御によって速度維持や先行車追従を行うための自動加減速制御が行われる。特に,このシステムでは,速度制御時には自車速度が所定の速度幅内となるように,また,先行車追従制御時には車間距離が所定の距離内となるように制御する。
図4|ステレオカメラとパワートレイン制御を統合化したシステムの制御ブロック図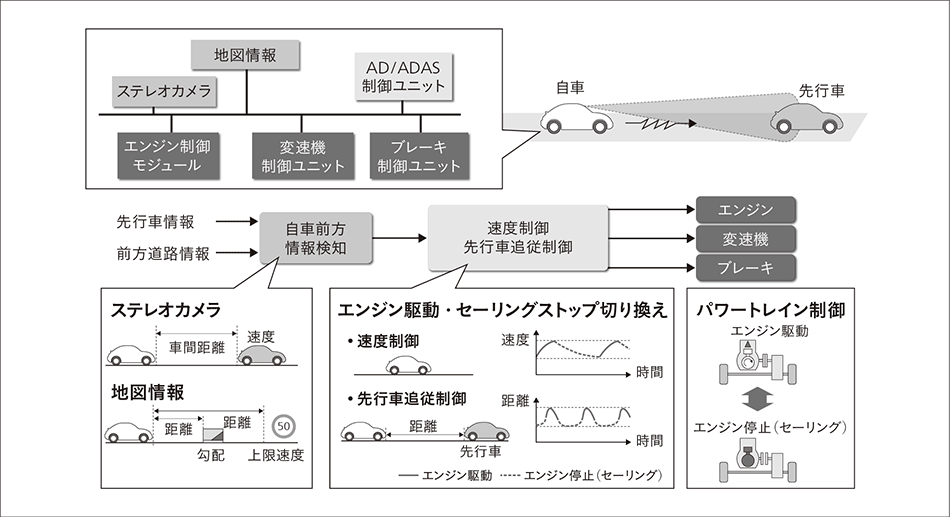 ステレオカメラから先行車との相対距離・速度を,地図情報から勾配・上限速度および距離を取得し,エンジン駆動・セーリングストップ切り換えで所定速度幅内および所定車間距離内となるように制御する。
ステレオカメラから先行車との相対距離・速度を,地図情報から勾配・上限速度および距離を取得し,エンジン駆動・セーリングストップ切り換えで所定速度幅内および所定車間距離内となるように制御する。
具体的には,エンジン駆動によって上限車速あるいは最小車間距離近傍まで加速し,セーリングストップによって下限車速あるいは最大車間距離近傍まで燃料を消費せずに走行制御を行う。なお,エンジン駆動とセーリングストップの切り換えで速度・車間距離を所定の範囲内に制御するために,自車および先行車の挙動(速度・走行距離)を予測して制御の切り換えを行う。このときの自車の挙動は,道路勾配などの道路環境の影響も受けるため,地図から取得した道路情報を活用し,最適なタイミングの制御切り換えを実現する。
3.1に記した開発システムを搭載したプロト車両を構築し,開発システムの燃費改善効果の検証を実施した結果を図5に示す。
図5|プロト車両による評価検証結果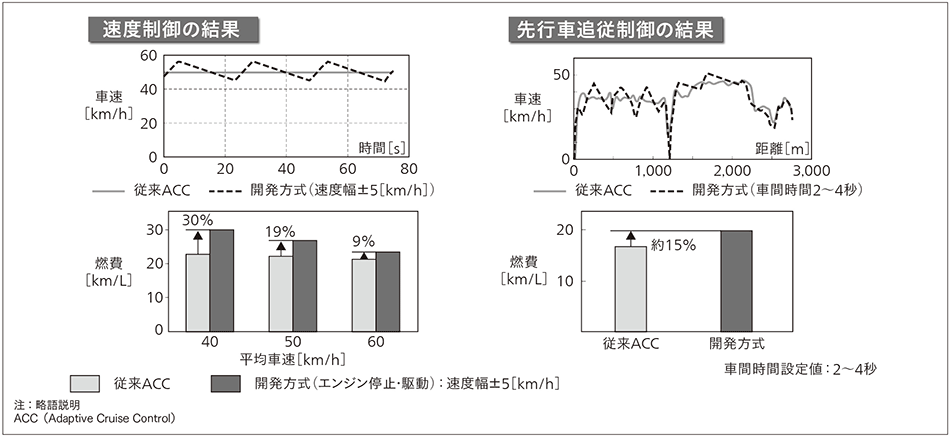 速度制御と先行車追従制御における開発システムをプロト車両に搭載し,従来ACCと燃費効果を比較した。
速度制御と先行車追従制御における開発システムをプロト車両に搭載し,従来ACCと燃費効果を比較した。
左側は,従来ACC(Adaptive Cruise Control)で一定車速を維持した場合と,平均車速が同一となるように開発方式で走行した場合の比較を示している。開発方式の車速幅は,±5 km/hとした。開発方式では,車速の変動があるが,従来ACCと比較して燃費改善効果が得られている。
右側は,日立のテストコースにて先行車追従制御を行った結果であり,従来ACCで先行車追従した場合と開発方式で先行車追従した場合の比較を示している。開発方式の車間距離幅は,車間時間2〜4秒とした。開発方式では同様に車速変動があるが,従来ACCと比較して約15%の燃費改善効果が得られている。
外界認識に基づき自車前方を先読みし,パワートレインを制御することで実走行燃費を改善するシステムとそれを実現する技術について紹介した。さらに,システムの具体的な開発事例と効果について述べ,その有効性を示した。
引き続き,安全・快適・環境・時間を考慮した運転支援システムの開発を通じて,「人・クルマ・社会」に新たな価値を創造して豊かな社会の実現に貢献する。
