
[ⅱ]安全・安心を提供する自動運転技術・電動化安全・安心を提供する自動運転に向けた取り組み
執筆者
安藤 敏之Ando Toshiyuki
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット 戦略本部 事業企画部 所属
佐々木 朋春Sasaki Tomoharu
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット Japanリージョナルビジネスユニット兼 戦略本部 所属
工藤 英康Kudo Hideyasu
- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット 戦略本部 事業企画部 所属
岡田 隆Okada Takashi
- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
執筆者の詳細を見る
安藤 敏之Ando Toshiyuki

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット 戦略本部 事業企画部 所属
- 現在,AD/ADASのマーケティングおよび技術戦略に従事
- 自動車技術会会員,
- 自動車技術会認定プロフェッショナルエンジニア
佐々木 朋春Sasaki Tomoharu

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット Japanリージョナルビジネスユニット兼 戦略本部 所属
- 現在,AD/ADASの日本における事業管理とグローバル戦略に従事
工藤 英康Kudo Hideyasu

- 日立Astemo株式会社 パワートレイン&セーフティシステム事業部 AD/ADASビジネスユニット 戦略本部 事業企画部 所属
- 現在,AD/ADASの事業戦略,製品戦略に従事
岡田 隆Okada Takashi

- 日立Astemo株式会社 技術開発統括本部 次世代モビリティ開発本部 自動運転技術開発部 所属
- 現在,AD/ADASに関する先行技術開発に従事
- 日本機械学会会員
- 計測自動制御学会会員
- 自動車技術会会員
ハイライト
交通事故ゼロの実現のためには,ドライバーのミスを車がサポートして交通事故を未然に防止する機能や,ドライバーの運転負荷を低減する機能の開発が必要である。その機能として,緊急時の自動ブレーキなど安全・安心を提供する先進運転支援システムや,ハンズオフでの前車追従など快適・利便を提供する自動運転技術がある。
本稿では,自動運転につながる利用可能な走行場所や限定された走行シーンの拡大に対応するロードマップとその実現に必要な三つの技術の面から,日立グループの先進運転支援と自動運転技術開発のこれまでの実績と今後の取り組みを紹介する。

1. はじめに
近年,自動車業界は100年に一度と呼ばれる大変革期を迎えている。将来動向としてC(Connected:コネクテッド),A(Autonomous:自動運転),S(Shared & Services:シェアリング/サービス),E(Electric:電動化)の頭文字を取った「CASE」をトレンドワードに,幅広い領域で急速な技術開発が進められている。中でも自動運転(AD:Autonomous Driving)は,センシング技術の進歩や大規模データ,人工知能(AI:Artificial Intelligence)などの活用による新たな機能を創出し,自動車の安全・安心および快適・利便な移動を実現させようとしている。
本稿では,交通事故ゼロをめざして安全・安心を提供する日立グループの先進運転支援システム(ADAS:Advanced Driver Assistance Systems)や自動運転技術への取り組みについて,これまでの実績や将来の方向性を示すロードマップおよび技術開発の動向を紹介する。
2. 自動運転技術への期待
日本における交通事故件数と死亡者数の推移を図1に示す1)。自動車の急速な普及に伴い,交通事故による死亡者数は1970年に1万6,765人でピークに達したが,さまざまなパッシブセーフティ機能の開発・装備などによって,2020年には2,839人まで低減した。
今後これをさらに進めて自動車による事故ゼロ・死傷者ゼロを達成するためには,これまでのパッシブセーフティからアクティブセーフティに重点を置き,運転時の疲労軽減や事故につながるヒューマンエラーを車がサポートして事故を未然に防止する先進運転支援システム,さらには人の運転操作を必要としないことでドライバーの負荷低減につながる自動運転機能の搭載が有効である。
図1|交通事故件数と死亡者数(日本) パッシブセーフティ装置の普及拡大により交通事故死者数は年々減少している。さらなる交通事故死者数の低減に向けて,事故を未然に防ぐ予防安全技術によるアクティブセーフティ装置の導入が期待される。
3. 自動運転に向けた日立グループの取り組み
日立グループは,安全・安心な移動を提供するため,20年以上にわたり先進運転支援システムや自動運転の実現につながる技術や製品の開発に取り組み,自動車メーカーに採用された実績を持つ(図2参照)。
図2|先進運転支援システム/自動運転における日立グループの実績  日立グループは20年以上にわたり,先進運転支援システム/自動運転や関連する車両制御などの製品開発に取り組み,自動車メーカーに採用された実績を持つ。
日立グループは20年以上にわたり,先進運転支援システム/自動運転や関連する車両制御などの製品開発に取り組み,自動車メーカーに採用された実績を持つ。
3.1 センシング技術
予防安全では,危険な状態をいち早く察知するために,車両の前後左右を同時かつ正確に認識するセンシング技術が重要になる。特に日立グループでは,画像の取得と同時に周囲物体までの距離を認識できるステレオカメラの開発に注力してきた。その機能の有効性から,これまでさまざまな車両に採用・搭載され,多くの事故を未然に防いできた2)。
3.2 ECU
センサーで認識した情報などから的確な判断を瞬時に行うECU(Electronic Control Unit)についても,先行車追従走行や車線維持機能などを制御する先進運転支援システムのECUを開発し,製品として車載してきた実績を持つ。
近年では,ハンズフリーでの高速道における先行車の追従走行,低速車両の追い越し,自動車線変更を可能にする機能を実装したECUを開発し,人の操作を必要としない自動運転の実現に寄与している。
3.3 車両制御
状況に応じた安全な対応をするためには,判断した結果の挙動や経路に沿って「走る」,「曲がる」,「止まる」といった車両運動を的確に制御しなければならない。日立グループはこれまで安全かつ快適に車両を動かす制御プログラム3)のほか,EPS(Electric Power Steering)やESC(Electronic Stability Control)といった制御デバイスなどを開発し製品化してきた。
3.4 コネクテッドカー
自動車単体での進化だけでなく社会インフラを通じて収集された膨大な情報を活用することで,自動運転の価値を向上させるコネクテッドカー技術がある。
自動車と社会インフラやセンターサービスおよびそれらをつなぐ通信セキュリティ技術に至るまで,日立グループが持つ包括的な事業領域を活用し,OTA(Over The Air)による車載ソフトウエア更新や鍵管理の仕組みに代表されるセンターから車両までのセキュリティを確保するセキュアな配信を一括して提供できることも,日立グループが持つ特徴の一つである4,5)。
4. 自動運転に向けたロードマップ
先進運転支援や自動運転技術領域に対する日立グループの取り組みや今後実現しようとしている機能は,横軸に自動運転技術の進化,縦軸に提供する機能・価値を置いたロードマップで示すことができる(図3参照)。
図3|先進運転支援システム/自動運転ロードマップ 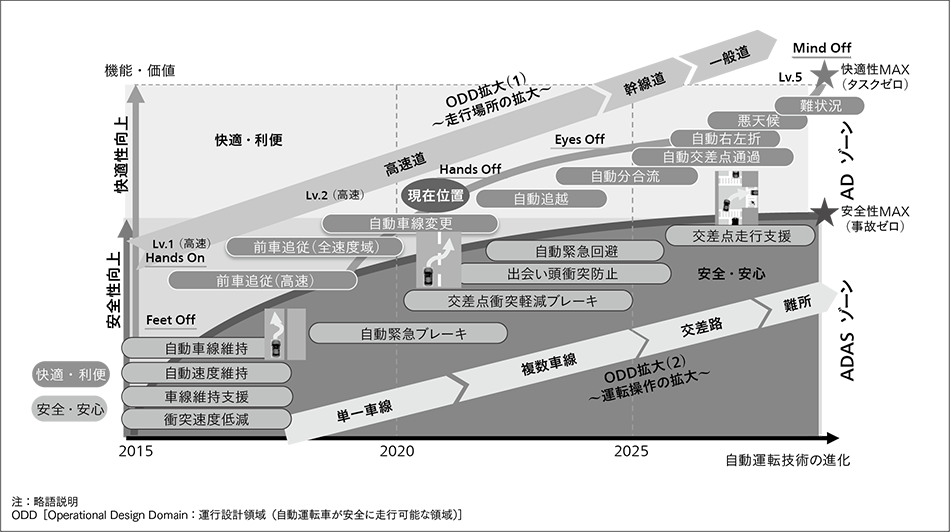 先進運転支援システム/自動運転に対する日立グループのこれまでの実績や今後の取り組みをロードマップで示す。二つのODD拡大の推進によって,安全性と快適性の向上をめざしている。機能名称の黒字は安全・安心機能,白抜き文字は快適・利便機能を表している。
先進運転支援システム/自動運転に対する日立グループのこれまでの実績や今後の取り組みをロードマップで示す。二つのODD拡大の推進によって,安全性と快適性の向上をめざしている。機能名称の黒字は安全・安心機能,白抜き文字は快適・利便機能を表している。
4.1 走行可能領域の拡大をめざすロードマップ
同図の下半分に示した領域は先進運転支援の領域で,衝突速度の低減や自動緊急ブレーキなど安全・安心を向上する機能の提供によって,安全性を最大にし,最終的には事故ゼロの達成をめざしている。その上の領域は,自動運転の領域で,安全・安心を基盤として前車追従や自動分合流・自動右左折といった快適性・利便性を向上する機能の提供によって,ドライバーの運転負荷を軽減し,最終的にはタスクゼロの達成をめざしている。
このような自動運転技術の進化と普及拡大を,日立グループは先進運転支援システムや自動運転で走行できる場所や領域を拡大していくこと,と捉えている。自動運転が可能な領域はODD(Operational Design Domain:運行設計領域)と言われている。先進運転支援システムや自動運転で走行できるシーンの拡大,すなわちODD拡大によって,安全・安心かつ利便で快適な移動を実現するために,日立グループは次に挙げる二つの領域拡大に取り組んでいる。
4.2 走行場所の拡大
一つ目のODD拡大は,走行場所の拡大である。先進運転支援システムや自動運転機能は,走行環境が整備された高速道路や自動車専用道など,走行場所を限定した機能として装備され普及を始めている。今後は,その作動領域を高速道路から幹線道路,さらには一般道や市街地に広げることでODD拡大を進めようとしている。
4.3 運転操作の拡大
二つ目のODD拡大は,運転操作の拡大である。先進運転支援システムや自動運転機能が使用できるのは,当初は単一車線内での走行に限定されていたが,技術の進化とともに車線変更や低速車両の追い越しに拡大してきた。今後は,さらにサポート可能な運転操作を広げ,交差点での右左折操作や狭い道路でのすれ違いなど難所における運転をサポートできる機能へと発展させていく。
5. 自動運転を実現する技術開発
前述したODD拡大に必要な三つの技術について,以下に述べる。
自車両が目的地に向かって高速道路を走行している途中で,分岐にさしかかった状況を図4に示す。
自車両の前方に示した領域(A)は,車載センサーで認識が可能な領域(一般には200 m程度)を,さらにその先の領域(B)は,車載センサーでは認識が難しい遠方の領域を示している。
図4|ODD拡大のために必要な三つの技術 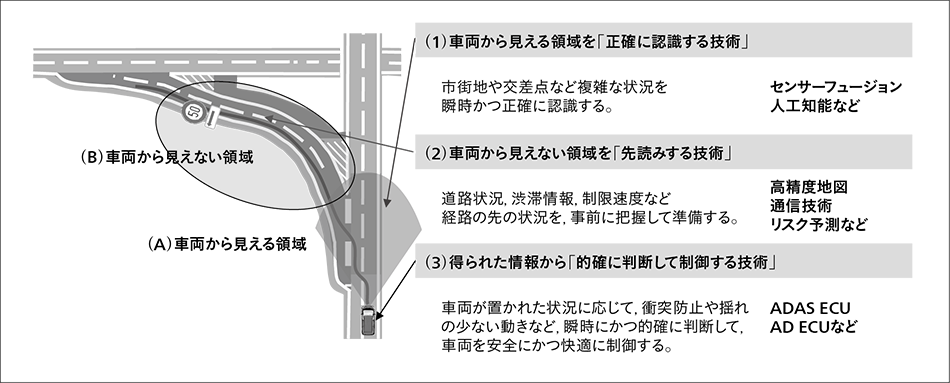 自車両が目的地に向かって高速道路を走行している途中で,分岐にさしかかった状況を示している。ODD拡大のためには,(1)~(3)の三つの技術が必要になる。
自車両が目的地に向かって高速道路を走行している途中で,分岐にさしかかった状況を示している。ODD拡大のためには,(1)~(3)の三つの技術が必要になる。
5.1 (1)車両から見える領域を「正確に認識する技術」
交差点や市街地など一般道における運転では,前方だけでなく車両全周囲の複雑な状況を正確に把握して,次の動作を的確に判断しなければならない。
そのため日立グループでは,多種多様なセンサーの情報を組み合わせて補完することで,より精細な認識を実現するマルチセンサーフュージョン技術や,多くの物体が入り組んだ複雑なシーンでも状況を正しく認識できるAIの開発に取り組んでいる([論文「自動運転/先進運転支援システムの進化を支えるセンシング技術」参照])。
5.2 (2)車両から見えない領域を「先読みする技術」
車両から認識できない先の道路の状況を先読み情報として把握できれば,急カーブ前の減速や渋滞最後尾への衝突回避,インターチェンジ手前での余裕のある適切なタイミングでの車線変更など,先の状況を見据えた経路設定や円滑な車両制御が行えるため,より安全で急な加減速を伴わない快適な走行が実現できる。
日立グループでは先読み情報を獲得するために,高精度地図をMPU(Map Position Unit)で読み出し,現在の自車位置を推定する技術や,先のリスク予測をする技術,OTAやCGW(Central Gateway)などを介したセキュアな通信を通じて,クラウドからの地図更新および渋滞情報など先の道路状況を取得する技術開発に取り組んでいる([論文「安全性と快適性を両立する自動運転向け車載ユニット」参照])。
5.3 (3)得られた情報から「的確に判断して制御する技術」
道路状況は走行中にも刻々と変化するため,常に車両が置かれた状況に応じて瞬時かつ的確な制御が求められる。それを担うのがADAS ECUやAD ECUであり,日立グループはこれまで小型・高信頼性のECUを開発し,さまざまな先進運転支援機能や自動運転機能を実装し製品化してきた(図2参照)。
さらには,横揺れやジャークを最小限に抑えた快適な移動のための軌道計画アルゴリズム6)や,目標軌道に対して高精度に追従走行可能な車両制御技術など,より高度に安全と快適を両立させる車両制御技術を開発している([論文「安全・安心・快適を実現する車両統合制御技術」参照])。
6. おわりに
これまで述べてきたように,センサーや通信・状況判断や車両制御などの幅広い技術領域が求められる先進運転支援や自動運転技術に対して,日立グループは広範囲に多数の技術やサービスを研究開発し保有している。
この強みを生かし,安全・安心や事故ゼロ・死亡者ゼロの実現に向けて,持続可能な社会の構築に貢献する先進的なモビリティソリューションを,ECUからセンターサービスに至るトータルシステムとして提供するシステムインテグレータをめざしていく。
参考文献など
- 1)
- 警察庁 交通事故統計,令和2年(2020)年報
- 2)
- 株式会社SUBARU,スバル アイサイト搭載車の事故件数調査結果について(2016.1)
- 3)
- 日立ニュースリリース,一般道での自動運転実用化に向け,安全な走行を実現するための高精度な追従走行を可能にする技術を開発(2019.10)
- 4)
- 日立ニュースリリース,高度運転支援ECUおよびOTAによる自動地図更新に対応した高精度地図ユニットが日産の新型「スカイライン」に初採用(2020.9)
- 5)
- 日立ニュースリリース,新型レジェンドにAD ECU,OTAユニットが採用 OTAによる車両制御ソフトウエアの更新に対応(2021.4)(PDF, 402KB)
- 6)
- 日立ニュースリリース,快適な自動運転車両空間を実現する高精度な軌道計画技術を開発(2021.5)



